 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSW-ASR: A Context-Aware Hybrid ASR Pipeline for Robust Single Word Speech Recognition
Jan 28, 2026Single-word Automatic Speech Recognition (ASR) is a challenging task due to the lack of linguistic context and sensitivity to noise, pronunciation variation, and channel artifacts, especially in low-resource, communication-critical domains such as healthcare and emergency response. This paper reviews recent deep learning approaches and proposes a modular framework for robust single-word detection. The system combines denoising and normalization with a hybrid ASR front end (Whisper + Vosk) and a verification layer designed to handle out-of-vocabulary words and degraded audio. The verification layer supports multiple matching strategies, including embedding similarity, edit distance, and LLM-based matching with optional contextual guidance. We evaluate the framework on the Google Speech Commands dataset and a curated real-world dataset collected from telephony and messaging platforms under bandwidth-limited conditions. Results show that while the hybrid ASR front end performs well on clean audio, the verification layer significantly improves accuracy on noisy and compressed channels. Context-guided and LLM-based matching yield the largest gains, demonstrating that lightweight verification and context mechanisms can substantially improve single-word ASR robustness without sacrificing latency required for real-time telephony applications.
Enabling Remote Whole-Body Control with 5G Edge Computing
Aug 19, 2020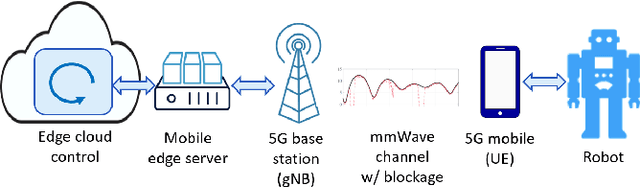
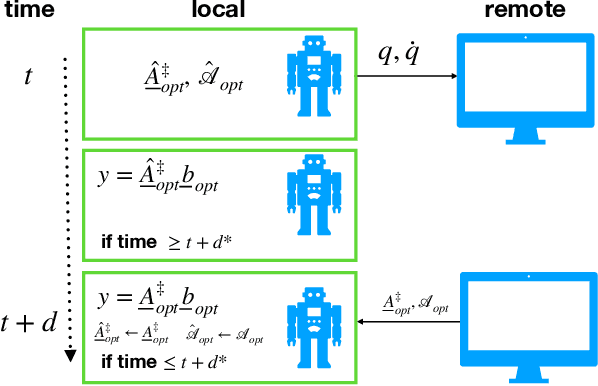
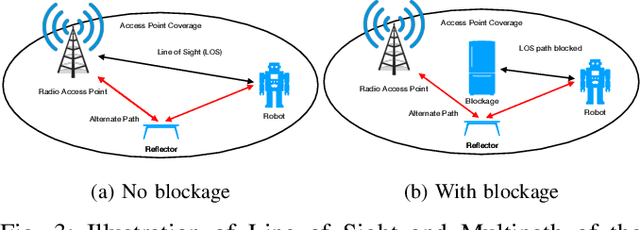
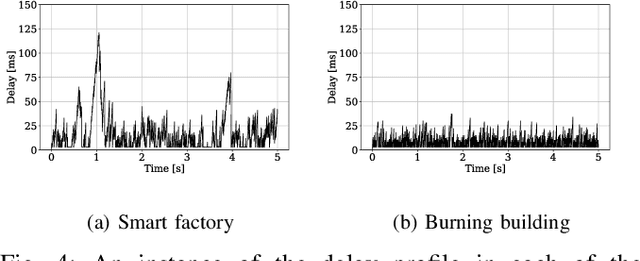
Real-world applications require light-weight, energy-efficient, fully autonomous robots. Yet, increasing autonomy is oftentimes synonymous with escalating computational requirements. It might thus be desirable to offload intensive computation--not only sensing and planning, but also low-level whole-body control--to remote servers in order to reduce on-board computational needs. Fifth Generation (5G) wireless cellular technology, with its low latency and high bandwidth capabilities, has the potential to unlock cloud-based high performance control of complex robots. However, state-of-the-art control algorithms for legged robots can only tolerate very low control delays, which even ultra-low latency 5G edge computing can sometimes fail to achieve. In this work, we investigate the problem of cloud-based whole-body control of legged robots over a 5G link. We propose a novel approach that consists of a standard optimization-based controller on the network edge and a local linear, approximately optimal controller that significantly reduces on-board computational needs while increasing robustness to delay and possible loss of communication. Simulation experiments on humanoid balancing and walking tasks that includes a realistic 5G communication model demonstrate significant improvement of the reliability of robot locomotion under jitter and delays likely to experienced in 5G wireless links.