 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Development Cycle for Automated Self-Exploration of Robot Behaviors
Jul 29, 2020



In this paper we introduce Q-Rock, a development cycle for the automated self-exploration and qualification of robotic behaviors. With Q-Rock, we suggest a novel, integrative approach to automate robot development processes. Q-Rock combines several machine learning and reasoning techniques to deal with the increasing complexity in the design of robotic systems. The Q-Rock development cycle consists of three complementary processes: (1) automated exploration of capabilities that a given robotic hardware provides, (2) classification and semantic annotation of these capabilities to generate more complex behaviors, and (3) mapping between application requirements and available behaviors. These processes are based on a graph-based representation of a robot's structure, including hardware and software components. A graph-database serves as central, scalable knowledge base to enable collaboration with robot designers including mechanical and electrical engineers, software developers and machine learning experts. In this paper we formalize Q-Rock's integrative development cycle and highlight its benefits with a proof-of-concept implementation and a use case demonstration.
Combinatorics of a Discrete Trajectory Space for Robot Motion Planning
May 25, 2020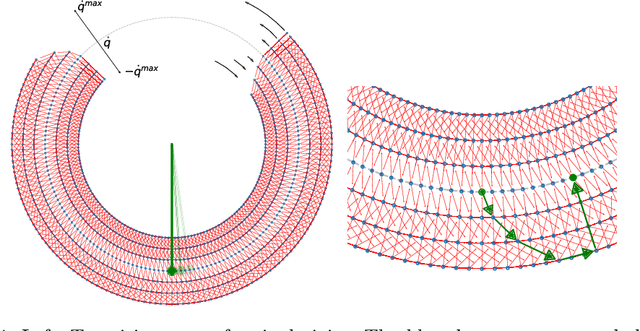
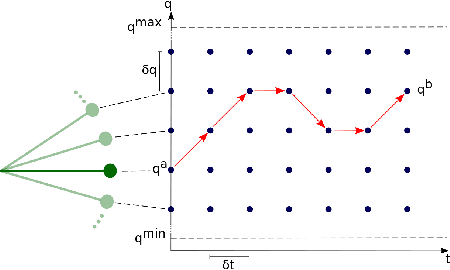
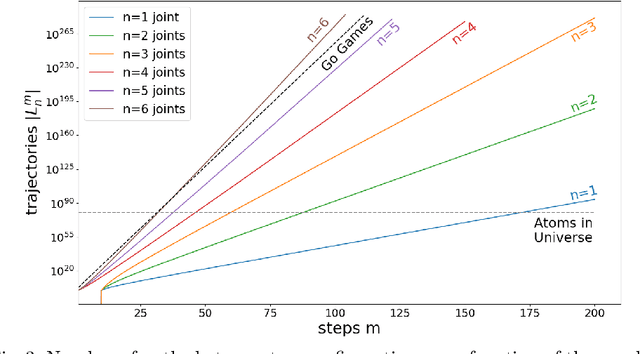
Motion planning is a difficult problem in robot control. The complexity of the problem is directly related to the dimension of the robot's configuration space. While in many theoretical calculations and practical applications the configuration space is modeled as a continuous space, we present a discrete robot model based on the fundamental hardware specifications of a robot. Using lattice path methods, we provide estimates for the complexity of motion planning by counting the number of possible trajectories in a discrete robot configuration space.