Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombinatorics of a Discrete Trajectory Space for Robot Motion Planning
Paper and Code
May 25, 2020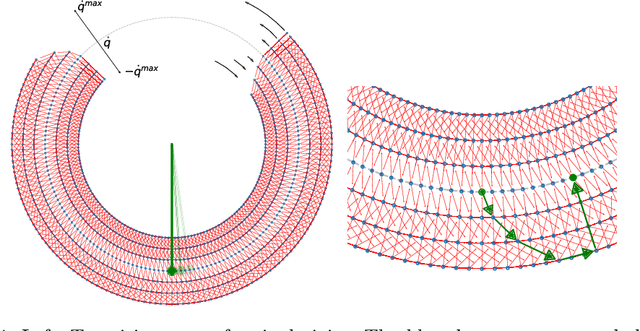
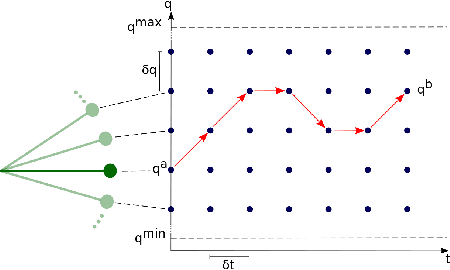
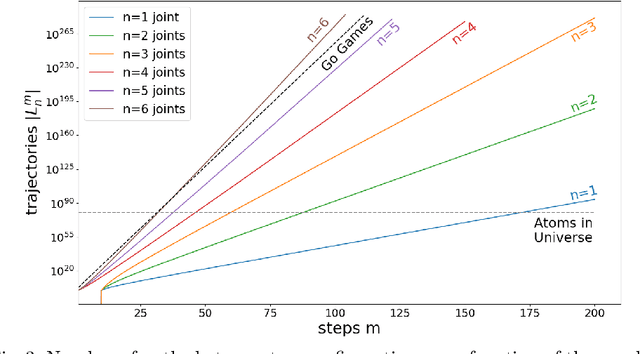
Motion planning is a difficult problem in robot control. The complexity of the problem is directly related to the dimension of the robot's configuration space. While in many theoretical calculations and practical applications the configuration space is modeled as a continuous space, we present a discrete robot model based on the fundamental hardware specifications of a robot. Using lattice path methods, we provide estimates for the complexity of motion planning by counting the number of possible trajectories in a discrete robot configuration space.
* 8 pages, 3 figures, to be published in the proceedings of 2nd IMA
Conference on Mathematics of Robotics 2021
View paper on