 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpotting the Unexpected (STU): A 3D LiDAR Dataset for Anomaly Segmentation in Autonomous Driving
May 04, 2025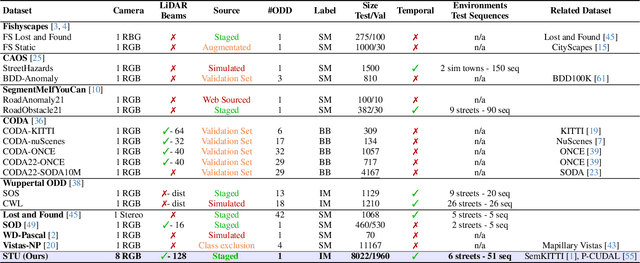
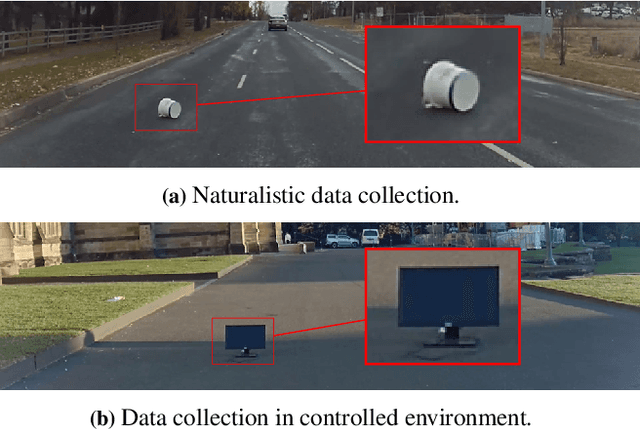


To operate safely, autonomous vehicles (AVs) need to detect and handle unexpected objects or anomalies on the road. While significant research exists for anomaly detection and segmentation in 2D, research progress in 3D is underexplored. Existing datasets lack high-quality multimodal data that are typically found in AVs. This paper presents a novel dataset for anomaly segmentation in driving scenarios. To the best of our knowledge, it is the first publicly available dataset focused on road anomaly segmentation with dense 3D semantic labeling, incorporating both LiDAR and camera data, as well as sequential information to enable anomaly detection across various ranges. This capability is critical for the safe navigation of autonomous vehicles. We adapted and evaluated several baseline models for 3D segmentation, highlighting the challenges of 3D anomaly detection in driving environments. Our dataset and evaluation code will be openly available, facilitating the testing and performance comparison of different approaches.
Panoptic-CUDAL Technical Report: Rural Australia Point Cloud Dataset in Rainy Conditions
Mar 20, 2025Existing autonomous driving datasets are predominantly oriented towards well-structured urban settings and favorable weather conditions, leaving the complexities of rural environments and adverse weather conditions largely unaddressed. Although some datasets encompass variations in weather and lighting, bad weather scenarios do not appear often. Rainfall can significantly impair sensor functionality, introducing noise and reflections in LiDAR and camera data and reducing the system's capabilities for reliable environmental perception and safe navigation. We introduce the Panoptic-CUDAL dataset, a novel dataset purpose-built for panoptic segmentation in rural areas subject to rain. By recording high-resolution LiDAR, camera, and pose data, Panoptic-CUDAL offers a diverse, information-rich dataset in a challenging scenario. We present analysis of the recorded data and provide baseline results for panoptic and semantic segmentation methods on LiDAR point clouds. The dataset can be found here: https://robotics.sydney.edu.au/our-research/intelligent-transportation-systems/