 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManifold-Matching Autoencoders
Mar 17, 2026We study a simple unsupervised regularization scheme for autoencoders called Manifold-Matching (MMAE): we align the pairwise distances in the latent space to those of the input data space by minimizing mean squared error. Because alignment occurs on pairwise distances rather than coordinates, it can also be extended to a lower-dimensional representation of the data, adding flexibility to the method. We find that this regularization outperforms similar methods on metrics based on preservation of nearest-neighbor distances and persistent homology-based measures. We also observe that MMAE provides a scalable approximation of Multi-Dimensional Scaling (MDS).
Dynamic programming with partial information to overcome navigational uncertainty in a nautical environment
Dec 29, 2021
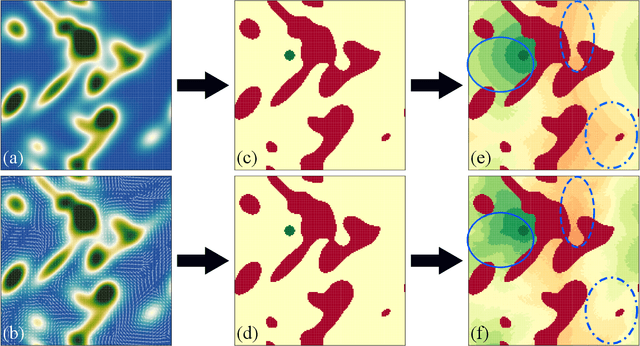
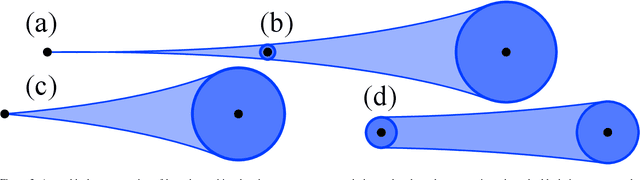
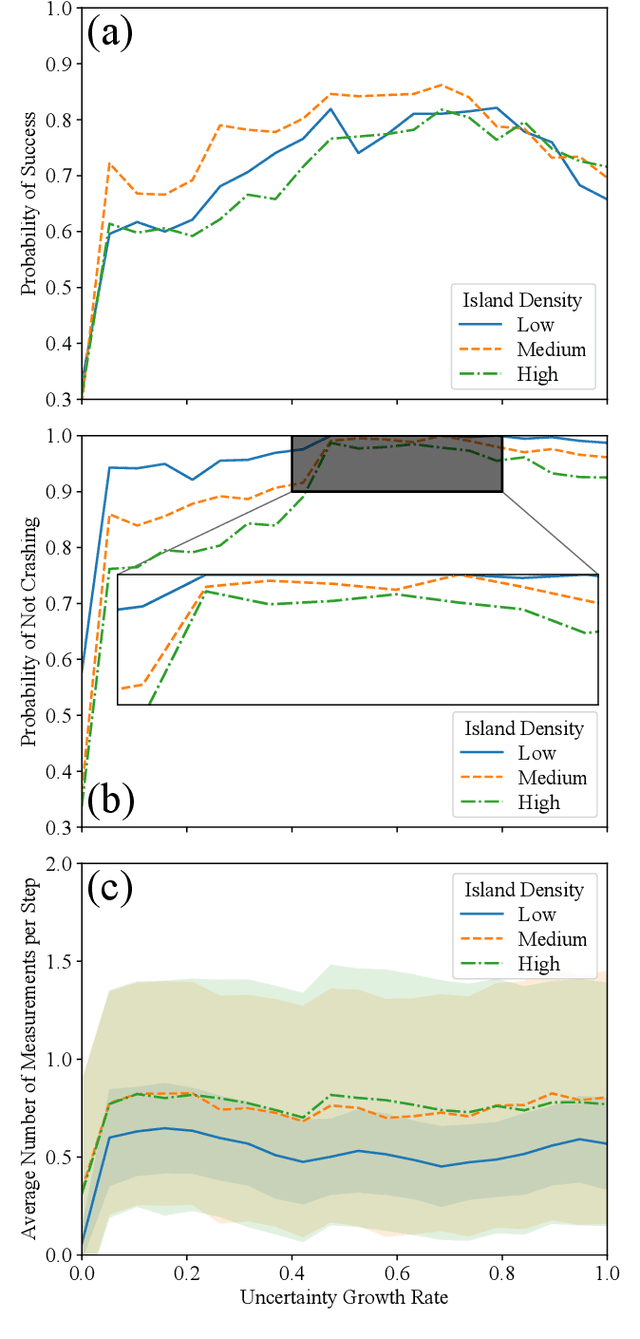
Using a toy nautical navigation environment, we show that dynamic programming can be used when only partial information about a partially observed Markov decision process (POMDP) is known. By incorporating uncertainty into our model, we show that navigation policies can be constructed that maintain safety. Adding controlled sensing methods, we show that these policies can also lower measurement costs at the same time.