 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRESSim-MPM: A Material Point Method Library for Surgical Soft Body Simulation with Cutting and Suturing
Feb 25, 2025



A number of recent studies have focused on developing surgical simulation platforms to train machine learning (ML) agents or models with synthetic data for surgical assistance. While existing platforms excel at tasks such as rigid body manipulation and soft body deformation, they struggle to simulate more complex soft body behaviors like cutting and suturing. A key challenge lies in modeling soft body fracture and splitting using the finite-element method (FEM), which is the predominant approach in current platforms. Additionally, the two-way suture needle/thread contact inside a soft body is further complicated when using FEM. In this work, we use the material point method (MPM) for such challenging simulations and propose new rigid geometries and soft-rigid contact methods specifically designed for them. We introduce CRESSim-MPM, a GPU-accelerated MPM library that integrates multiple MPM solvers and incorporates surgical geometries for cutting and suturing, serving as a specialized physics engine for surgical applications. It is further integrated into Unity, requiring minimal modifications to existing projects for soft body simulation. We demonstrate the simulator's capabilities in real-time simulation of cutting and suturing on soft tissue and provide an initial performance evaluation of different MPM solvers when simulating varying numbers of particles.
Rigid Communication Topologies: Impact on Stability, Safety, Energy Consumption, Passenger Comfort, and Robustness of Vehicular Platoons
Dec 11, 2024This paper investigates the impact of rigid communication topologies (RCTs) on the performance of vehicular platoons, aiming to identify beneficial features in RCTs that enhance vehicles behavior. We introduce four performance metrics, focusing on safety, energy consumption, passenger comfort, and robustness of vehicular platoons. The safety metric is based on momentary distances between neighboring vehicles, their relative velocities, and relative accelerations. Thus, to have access to these relative values, we formulate the coupled dynamics between pairs of neighboring vehicles, considering initial conditions (position, velocity, acceleration), leader vehicle's velocity/acceleration trajectory, deployed RCT, and vehicles' parity/disparity. By decoupling the dynamics using a mapping matrix structured on deployed RCT, vehicles' features, and control gains, precise formulations for distance errors, relative velocities, and relative accelerations between all neighboring vehicles, over the travel time, are obtained. Comparing performance metric results across RCTs highlights that downstream information transmission-from vehicles ahead, particularly the leader vehicle, to vehicles behind-significantly enhances platoon stability, safety, energy consumption, and passenger comfort metrics. Conversely, receiving state information from vehicles behind degrades metrics, compromising safety, increasing energy consumption, and reducing passenger comfort. These findings underscore that forward-looking, leader-centric communications between vehicles markedly enhance platoon efficiency and safety.
Learning Autonomous Surgical Irrigation and Suction with the da Vinci Research Kit Using Reinforcement Learning
Nov 21, 2024


The irrigation-suction process is a common procedure to rinse and clean up the surgical field in minimally invasive surgery (MIS). In this process, surgeons first irrigate liquid, typically saline, into the surgical scene for rinsing and diluting the contaminant, and then suction the liquid out of the surgical field. While recent advances have shown promising results in the application of reinforcement learning (RL) for automating surgical subtasks, fewer studies have explored the automation of fluid-related tasks. In this work, we explore the automation of both steps in the irrigation-suction procedure and train two vision-based RL agents to complete irrigation and suction autonomously. To achieve this, a platform is developed for creating simulated surgical robot learning environments and for training agents, and two simulated learning environments are built for irrigation and suction with visually plausible fluid rendering capabilities. With techniques such as domain randomization (DR) and carefully designed reward functions, two agents are trained in the simulator and transferred to the real world. Individual evaluations of both agents show satisfactory real-world results. With an initial amount of around 5 grams of contaminants, the irrigation agent ultimately achieved an average of 2.21 grams remaining after a manual suction. As a comparison, fully manual operation by a human results in 1.90 grams remaining. The suction agent achieved 2.64 and 2.24 grams of liquid remaining across two trial groups with more than 20 and 30 grams of initial liquid in the container. Fully autonomous irrigation-suction trials reduce the contaminant in the container from around 5 grams to an average of 2.42 grams, although yielding a higher total weight remaining (4.40) due to residual liquid not suctioned. Further information about the project is available at https://tbs-ualberta.github.io/CRESSim/.
Evaluating Gait Symmetry with a Smart Robotic Walker: A Novel Approach to Mobility Assessment
Aug 21, 2024



Gait asymmetry, a consequence of various neurological or physical conditions such as aging and stroke, detrimentally impacts bipedal locomotion, causing biomechanical alterations, increasing the risk of falls and reducing quality of life. Addressing this critical issue, this paper introduces a novel diagnostic method for gait symmetry analysis through the use of an assistive robotic Smart Walker equipped with an innovative asymmetry detection scheme. This method analyzes sensor measurements capturing the interaction torque between user and walker. By applying a seasonal-trend decomposition tool, we isolate gait-specific patterns within these data, allowing for the estimation of stride durations and calculation of a symmetry index. Through experiments involving 5 experimenters, we demonstrate the Smart Walker's capability in detecting and quantifying gait asymmetry by achieving an accuracy of 84.9% in identifying asymmetric cases in a controlled testing environment. Further analysis explores the classification of these asymmetries based on their underlying causes, providing valuable insights for gait assessment. The results underscore the potential of the device as a precise, ready-to-use monitoring tool for personalized rehabilitation, facilitating targeted interventions for enhanced patient outcomes.
From Decision to Action in Surgical Autonomy: Multi-Modal Large Language Models for Robot-Assisted Blood Suction
Aug 14, 2024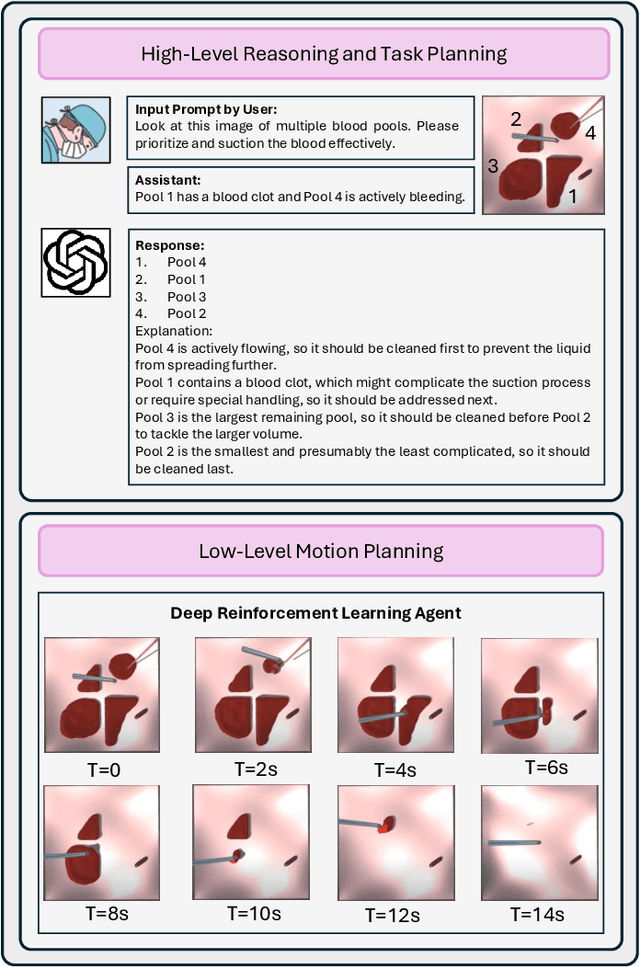
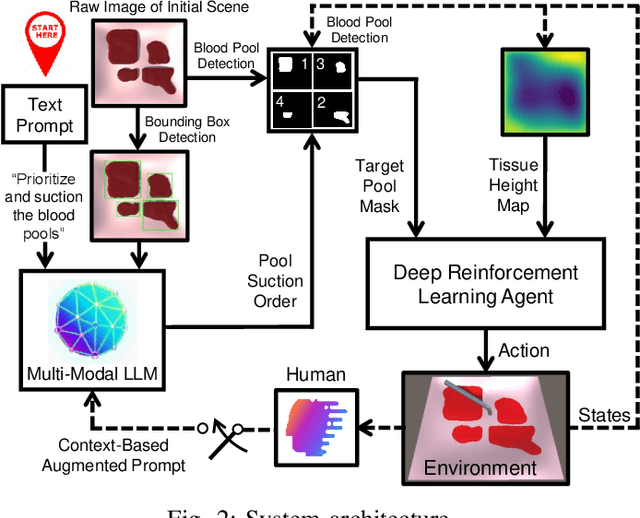
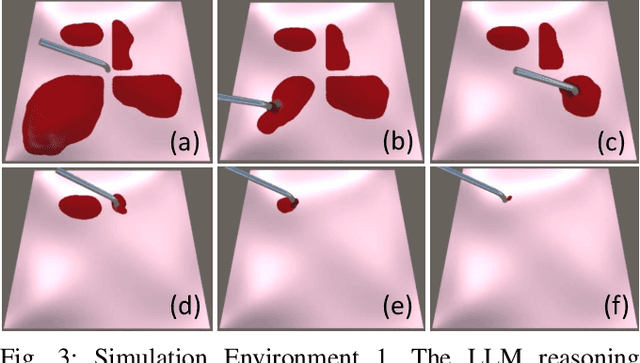
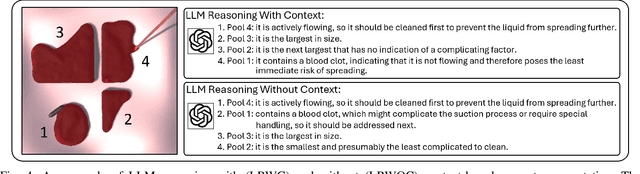
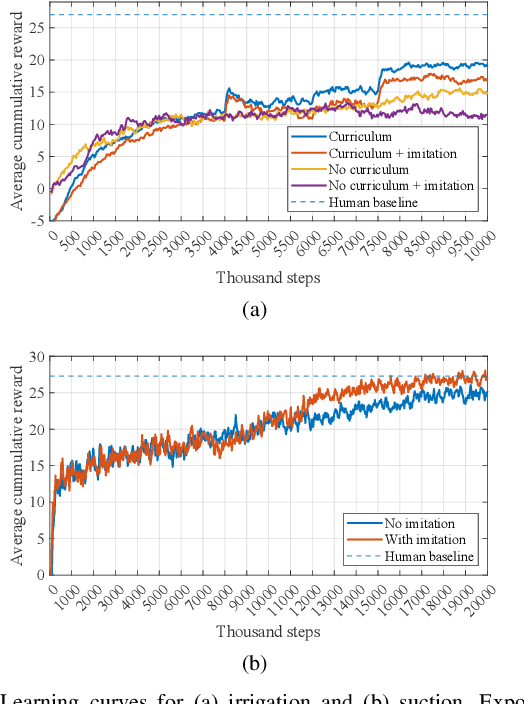
The rise of Large Language Models (LLMs) has impacted research in robotics and automation. While progress has been made in integrating LLMs into general robotics tasks, a noticeable void persists in their adoption in more specific domains such as surgery, where critical factors such as reasoning, explainability, and safety are paramount. Achieving autonomy in robotic surgery, which entails the ability to reason and adapt to changes in the environment, remains a significant challenge. In this work, we propose a multi-modal LLM integration in robot-assisted surgery for autonomous blood suction. The reasoning and prioritization are delegated to the higher-level task-planning LLM, and the motion planning and execution are handled by the lower-level deep reinforcement learning model, creating a distributed agency between the two components. As surgical operations are highly dynamic and may encounter unforeseen circumstances, blood clots and active bleeding were introduced to influence decision-making. Results showed that using a multi-modal LLM as a higher-level reasoning unit can account for these surgical complexities to achieve a level of reasoning previously unattainable in robot-assisted surgeries. These findings demonstrate the potential of multi-modal LLMs to significantly enhance contextual understanding and decision-making in robotic-assisted surgeries, marking a step toward autonomous surgical systems.
A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with the da Vinci Research Kit
Apr 08, 2024



Realistic real-time surgical simulators play an increasingly important role in surgical robotics research, such as surgical robot learning and automation, and surgical skills assessment. Although there are a number of existing surgical simulators for research, they generally lack the ability to simulate the diverse types of objects and contact-rich manipulation tasks typically present in surgeries, such as tissue cutting and blood suction. In this work, we introduce CRESSim, a realistic surgical simulator based on PhysX 5 for the da Vinci Research Kit (dVRK) that enables simulating various contact-rich surgical tasks involving different surgical instruments, soft tissue, and body fluids. The real-world dVRK console and the master tool manipulator (MTM) robots are incorporated into the system to allow for teleoperation through virtual reality (VR). To showcase the advantages and potentials of the simulator, we present three examples of surgical tasks, including tissue grasping and deformation, blood suction, and tissue cutting. These tasks are performed using the simulated surgical instruments, including the large needle driver, suction irrigator, and curved scissor, through VR-based teleoperation.
Speech-Based Human-Exoskeleton Interaction for Lower Limb Motion Planning
Oct 04, 2023



This study presents a speech-based motion planning strategy (SBMP) developed for lower limb exoskeletons to facilitate safe and compliant human-robot interaction. A speech processing system, finite state machine, and central pattern generator are the building blocks of the proposed strategy for online planning of the exoskeleton's trajectory. According to experimental evaluations, this speech-processing system achieved low levels of word and intent errors. Regarding locomotion, the completion time for users with voice commands was 54% faster than that using a mobile app interface. With the proposed SBMP, users are able to maintain their postural stability with both hands-free. This supports its use as an effective motion planning method for the assistance and rehabilitation of individuals with lower-limb impairments.
Sim-to-Real Surgical Robot Learning and Autonomous Planning for Internal Tissue Points Manipulation using Reinforcement Learning
Jun 25, 2023



Indirect simultaneous positioning (ISP), where internal tissue points are placed at desired locations indirectly through the manipulation of boundary points, is a type of subtask frequently performed in robotic surgeries. Although challenging due to complex tissue dynamics, automating the task can potentially reduce the workload of surgeons. This paper presents a sim-to-real framework for learning to automate the task without interacting with a real environment, and for planning preoperatively to find the grasping points that minimize local tissue deformation. A control policy is learned using deep reinforcement learning (DRL) in the FEM-based simulation environment and transferred to real-world situation. Grasping points are planned in the simulator by utilizing the trained policy using Bayesian optimization (BO). Inconsistent simulation performance is overcome by formulating the problem as a state augmented Markov decision process (MDP). Experimental results show that the learned policy places the internal tissue points accurately, and that the planned grasping points yield small tissue deformation among the trials. The proposed learning and planning scheme is able to automate internal tissue point manipulation in surgeries and has the potential to be generalized to complex surgical scenarios.
* 8 pages, 8 figures
Adaptive tracking control for task-based robot trajectory planning
Oct 14, 2020



This paper presents a -- Learning from Demonstration -- method to perform robot movement trajectories that can be defined as you go. This way unstructured tasks can be performed, without the need to know exactly all the tasks and start and end positions beforehand. The long-term goal is for children with disabilities to be able to control a robot to manipulate toys in a play environment, and for a helper to demonstrate the desired trajectories as the play tasks change. A relatively inexpensive 3-DOF haptic device made by Novint is used to perform tasks where trajectories of the end-effector are demonstrated and reproduced. Under the condition where the end-effector carries different loads, conventional control systems possess the potential issue that they cannot compensate for the load variation effect. Adaptive tracking control can handle the above issue. Using the Lyapunov stability theory, a set of update laws are derived to give closed-loop stability with proper tracking performance.