 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Decision to Action in Surgical Autonomy: Multi-Modal Large Language Models for Robot-Assisted Blood Suction
Aug 14, 2024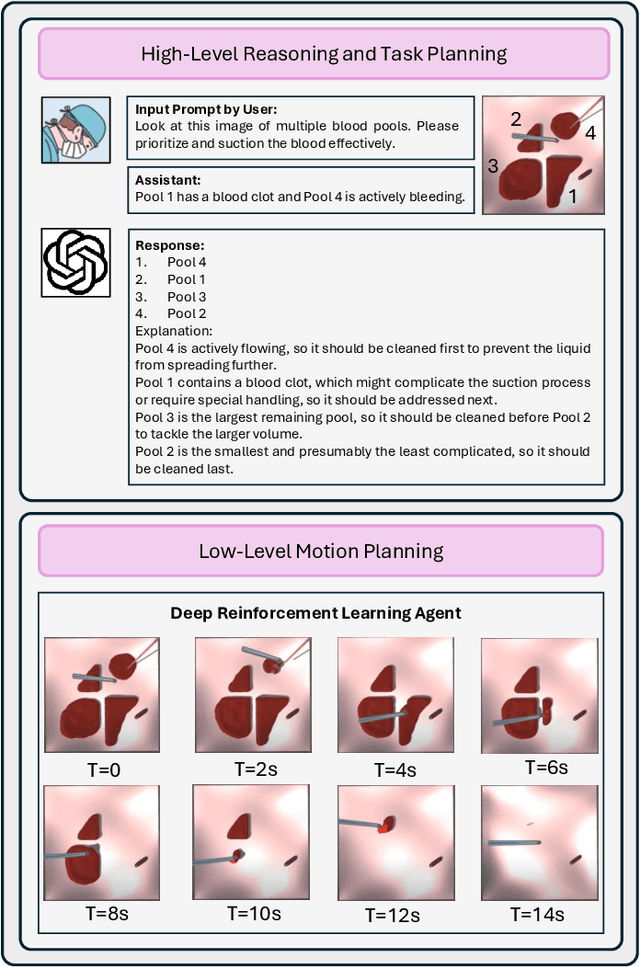
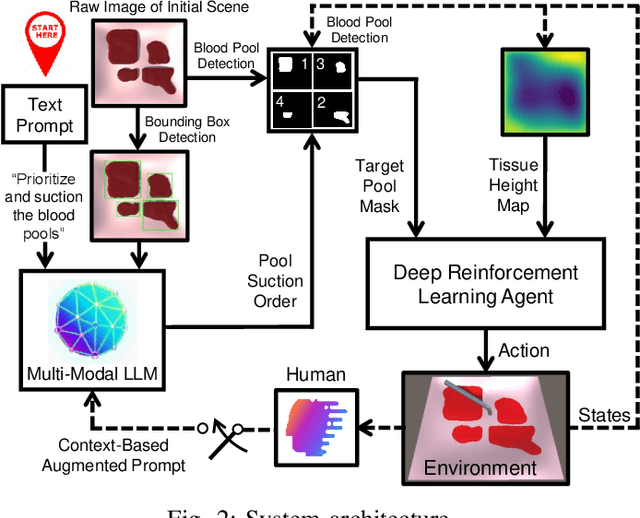
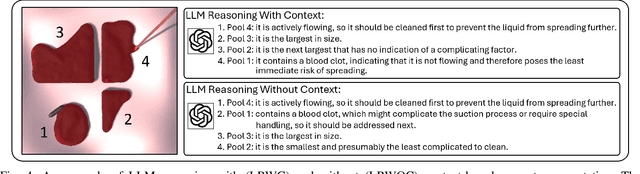
The rise of Large Language Models (LLMs) has impacted research in robotics and automation. While progress has been made in integrating LLMs into general robotics tasks, a noticeable void persists in their adoption in more specific domains such as surgery, where critical factors such as reasoning, explainability, and safety are paramount. Achieving autonomy in robotic surgery, which entails the ability to reason and adapt to changes in the environment, remains a significant challenge. In this work, we propose a multi-modal LLM integration in robot-assisted surgery for autonomous blood suction. The reasoning and prioritization are delegated to the higher-level task-planning LLM, and the motion planning and execution are handled by the lower-level deep reinforcement learning model, creating a distributed agency between the two components. As surgical operations are highly dynamic and may encounter unforeseen circumstances, blood clots and active bleeding were introduced to influence decision-making. Results showed that using a multi-modal LLM as a higher-level reasoning unit can account for these surgical complexities to achieve a level of reasoning previously unattainable in robot-assisted surgeries. These findings demonstrate the potential of multi-modal LLMs to significantly enhance contextual understanding and decision-making in robotic-assisted surgeries, marking a step toward autonomous surgical systems.
A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with the da Vinci Research Kit
Apr 08, 2024



Realistic real-time surgical simulators play an increasingly important role in surgical robotics research, such as surgical robot learning and automation, and surgical skills assessment. Although there are a number of existing surgical simulators for research, they generally lack the ability to simulate the diverse types of objects and contact-rich manipulation tasks typically present in surgeries, such as tissue cutting and blood suction. In this work, we introduce CRESSim, a realistic surgical simulator based on PhysX 5 for the da Vinci Research Kit (dVRK) that enables simulating various contact-rich surgical tasks involving different surgical instruments, soft tissue, and body fluids. The real-world dVRK console and the master tool manipulator (MTM) robots are incorporated into the system to allow for teleoperation through virtual reality (VR). To showcase the advantages and potentials of the simulator, we present three examples of surgical tasks, including tissue grasping and deformation, blood suction, and tissue cutting. These tasks are performed using the simulated surgical instruments, including the large needle driver, suction irrigator, and curved scissor, through VR-based teleoperation.