 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Multi-modal Property Dataset to Robot-centric Conceptual Knowledge About Household Objects
Jun 26, 2019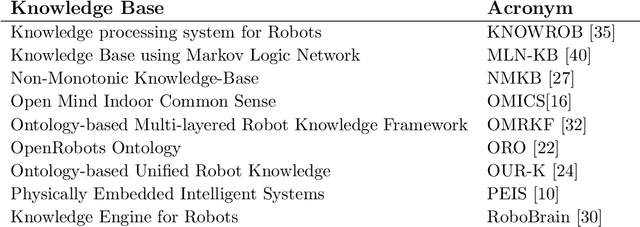
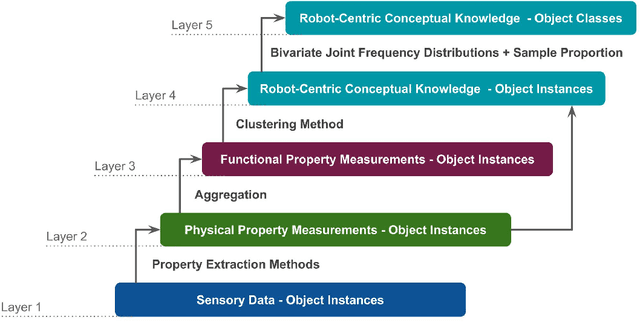
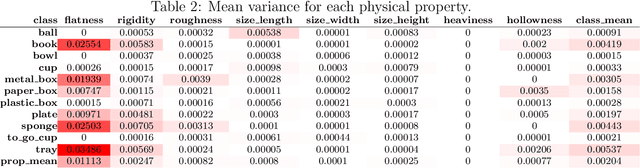
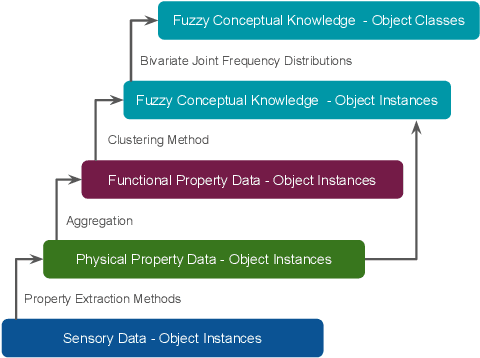
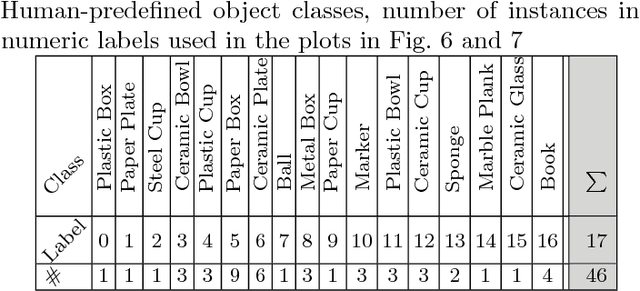
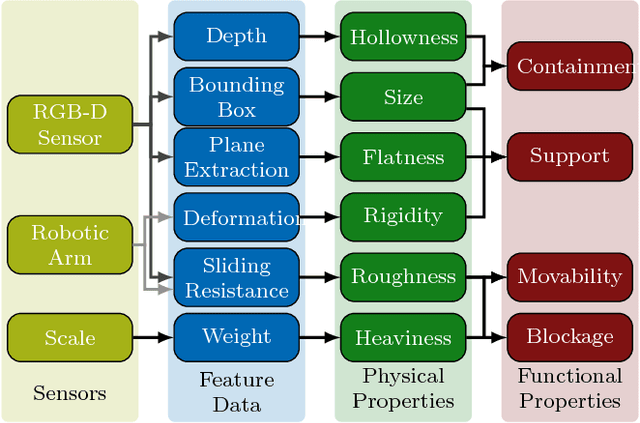
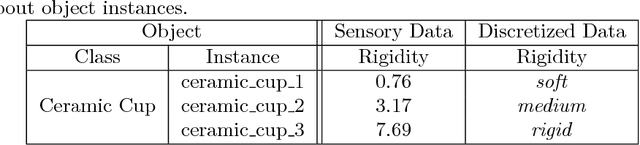
Tool-use applications in robotics require conceptual knowledge about objects for informed decision making and object interactions. State-of-the-art methods employ hand-crafted symbolic knowledge which is defined from a human perspective and grounded into sensory data afterwards. However, due to different sensing and acting capabilities of robots, their conceptual understanding of objects must be generated from a robot's perspective entirely, which asks for robot-centric conceptual knowledge about objects. With this goal in mind, this article motivates that such knowledge should be based on physical and functional properties of objects. Consequently, a selection of ten properties is defined and corresponding extraction methods are proposed. This multi-modal property extraction forms the basis on which our second contribution, a robot-centric knowledge generation is build on. It employs unsupervised clustering methods to transform numerical property data into symbols, and Bivariate Joint Frequency Distributions and Sample Proportion to generate conceptual knowledge about objects using the robot-centric symbols. A preliminary implementation of the proposed framework is employed to acquire a dataset comprising physical and functional property data of 110 houshold objects. This Robot-Centric dataSet (RoCS) is used to evaluate the framework regarding the property extraction methods, the semantics of the considered properties within the dataset and its usefulness in real-world applications such as tool substitution.
What Stands-in for a Missing Tool? A Prototypical Grounded Knowledge-based Approach to Tool Substitution
Oct 15, 2018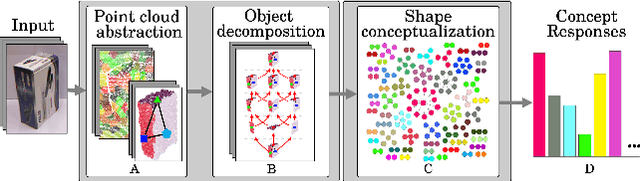

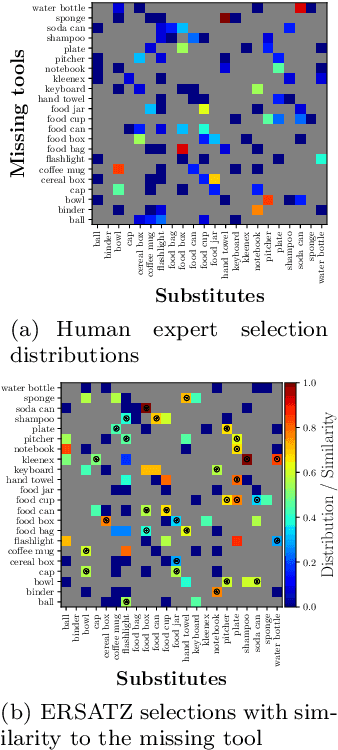
When a robot is operating in a dynamic environment, it cannot be assumed that a tool required to solve a given task will always be available. In case of a missing tool, an ideal response would be to find a substitute to complete the task. In this paper, we present a proof of concept of a grounded knowledge-based approach to tool substitution. In order to validate the suitability of a substitute, we conducted experiments involving 22 substitution scenarios. The substitutes computed by the proposed approach were validated on the basis of the experts' choices for each scenario. Our evaluation showed, in 20 out of 22 scenarios (91%), the approach identified the same substitutes as experts.
Towards Robot-Centric Conceptual Knowledge Acquisition
Oct 08, 2018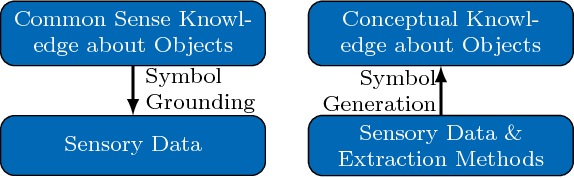
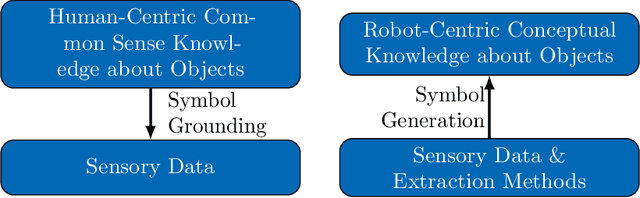
Robots require knowledge about objects in order to efficiently perform various household tasks involving objects. The existing knowledge bases for robots acquire symbolic knowledge about objects from manually-coded external common sense knowledge bases such as ConceptNet, Word-Net etc. The problem with such approaches is the discrepancy between human-centric symbolic knowledge and robot-centric object perception due to its limited perception capabilities. Ultimately, significant portion of knowledge in the knowledge base remains ungrounded into robot's perception. To overcome this discrepancy, we propose an approach to enable robots to generate robot-centric symbolic knowledge about objects from their own sensory data, thus, allowing them to assemble their own conceptual understanding of objects. With this goal in mind, the presented paper elaborates on the work-in-progress of the proposed approach followed by the preliminary results.