 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robot-Centric Conceptual Knowledge Acquisition
Paper and Code
Oct 08, 2018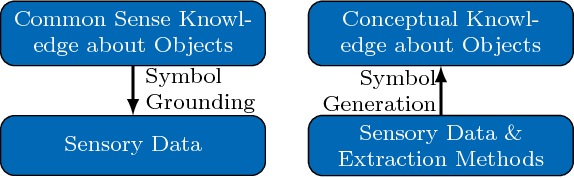
Robots require knowledge about objects in order to efficiently perform various household tasks involving objects. The existing knowledge bases for robots acquire symbolic knowledge about objects from manually-coded external common sense knowledge bases such as ConceptNet, Word-Net etc. The problem with such approaches is the discrepancy between human-centric symbolic knowledge and robot-centric object perception due to its limited perception capabilities. Ultimately, significant portion of knowledge in the knowledge base remains ungrounded into robot's perception. To overcome this discrepancy, we propose an approach to enable robots to generate robot-centric symbolic knowledge about objects from their own sensory data, thus, allowing them to assemble their own conceptual understanding of objects. With this goal in mind, the presented paper elaborates on the work-in-progress of the proposed approach followed by the preliminary results.