Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Stands-in for a Missing Tool? A Prototypical Grounded Knowledge-based Approach to Tool Substitution
Paper and Code
Oct 15, 2018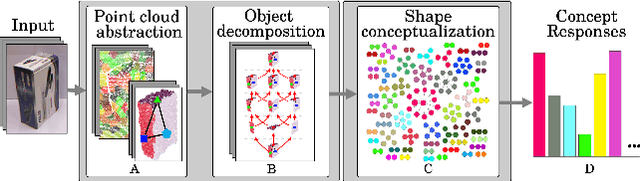

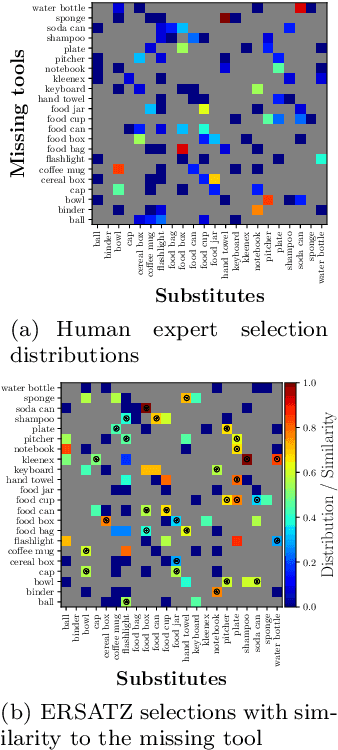
When a robot is operating in a dynamic environment, it cannot be assumed that a tool required to solve a given task will always be available. In case of a missing tool, an ideal response would be to find a substitute to complete the task. In this paper, we present a proof of concept of a grounded knowledge-based approach to tool substitution. In order to validate the suitability of a substitute, we conducted experiments involving 22 substitution scenarios. The substitutes computed by the proposed approach were validated on the basis of the experts' choices for each scenario. Our evaluation showed, in 20 out of 22 scenarios (91%), the approach identified the same substitutes as experts.
* This work is accepted for the 11th International Cognitive Robotics
Workshop (CogRob) of the 16th International Conference on Principles of
Knowledge Representation and Reasoning (KR), Tempe, Arizona, November, 2018
View paper on