 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandling Image and Label Resolution Mismatch in Remote Sensing
Nov 28, 2022Though semantic segmentation has been heavily explored in vision literature, unique challenges remain in the remote sensing domain. One such challenge is how to handle resolution mismatch between overhead imagery and ground-truth label sources, due to differences in ground sample distance. To illustrate this problem, we introduce a new dataset and use it to showcase weaknesses inherent in existing strategies that naively upsample the target label to match the image resolution. Instead, we present a method that is supervised using low-resolution labels (without upsampling), but takes advantage of an exemplar set of high-resolution labels to guide the learning process. Our method incorporates region aggregation, adversarial learning, and self-supervised pretraining to generate fine-grained predictions, without requiring high-resolution annotations. Extensive experiments demonstrate the real-world applicability of our approach.
Revisiting Near/Remote Sensing with Geospatial Attention
Apr 04, 2022



This work addresses the task of overhead image segmentation when auxiliary ground-level images are available. Recent work has shown that performing joint inference over these two modalities, often called near/remote sensing, can yield significant accuracy improvements. Extending this line of work, we introduce the concept of geospatial attention, a geometry-aware attention mechanism that explicitly considers the geospatial relationship between the pixels in a ground-level image and a geographic location. We propose an approach for computing geospatial attention that incorporates geometric features and the appearance of the overhead and ground-level imagery. We introduce a novel architecture for near/remote sensing that is based on geospatial attention and demonstrate its use for five segmentation tasks. The results demonstrate that our method significantly outperforms the previous state-of-the-art methods.
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
Aug 23, 2020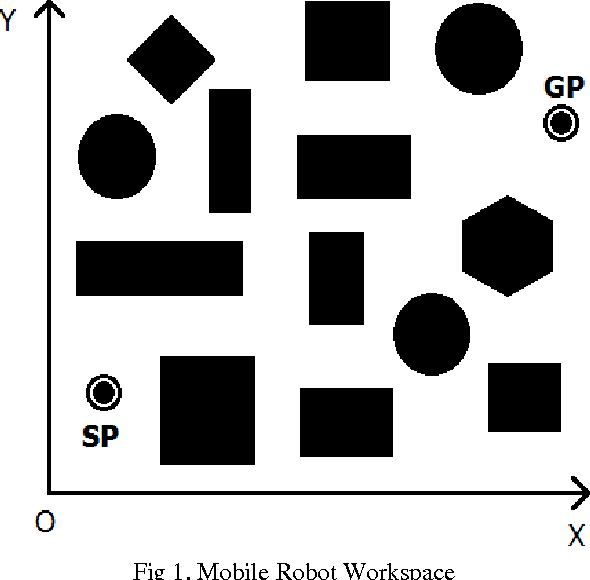
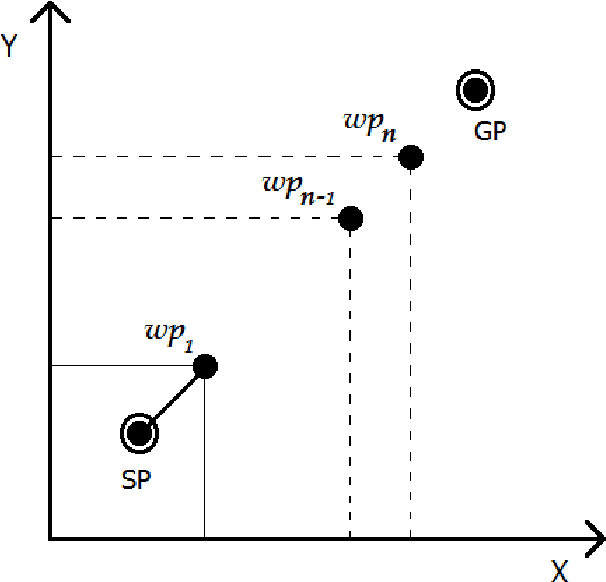


Motion planning is a key element of robotics since it empowers a robot to navigate autonomously. Particle Swarm Optimization is a simple, yet a very powerful optimization technique which has been effectively used in many complex multi-dimensional optimization problems. This paper proposes a path planning algorithm based on particle swarm optimization for computing a shortest collision-free path for a mobile robot in environments populated with static convex obstacles. The proposed algorithm finds the optimal path by performing random sampling on grid lines generated between the robot start and goal positions. Functionality of the proposed algorithm is illustrated via simulation results for different scenarios.
Single Image Cloud Detection via Multi-Image Fusion
Jul 29, 2020



Artifacts in imagery captured by remote sensing, such as clouds, snow, and shadows, present challenges for various tasks, including semantic segmentation and object detection. A primary challenge in developing algorithms for identifying such artifacts is the cost of collecting annotated training data. In this work, we explore how recent advances in multi-image fusion can be leveraged to bootstrap single image cloud detection. We demonstrate that a network optimized to estimate image quality also implicitly learns to detect clouds. To support the training and evaluation of our approach, we collect a large dataset of Sentinel-2 images along with a per-pixel semantic labelling for land cover. Through various experiments, we demonstrate that our method reduces the need for annotated training data and improves cloud detection performance.