 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompleting point cloud from few points by Wasserstein GAN and Transformers
Nov 23, 2022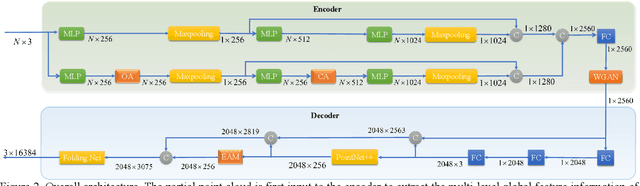
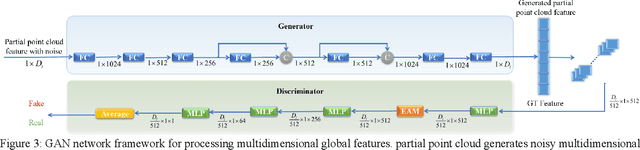
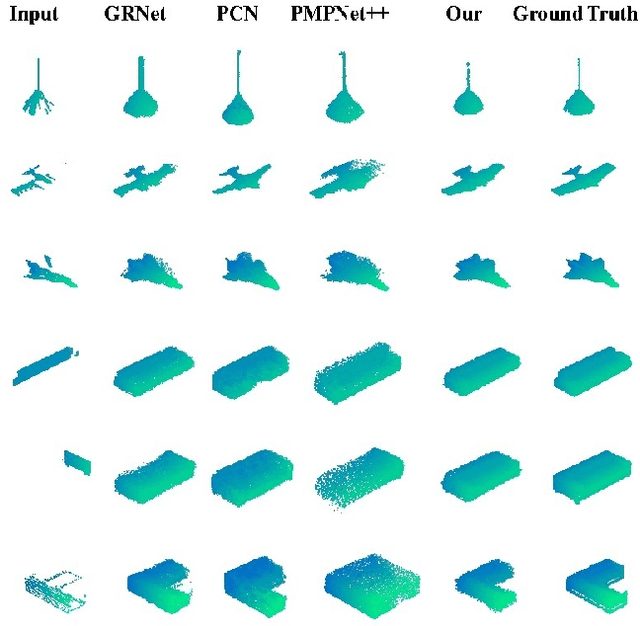
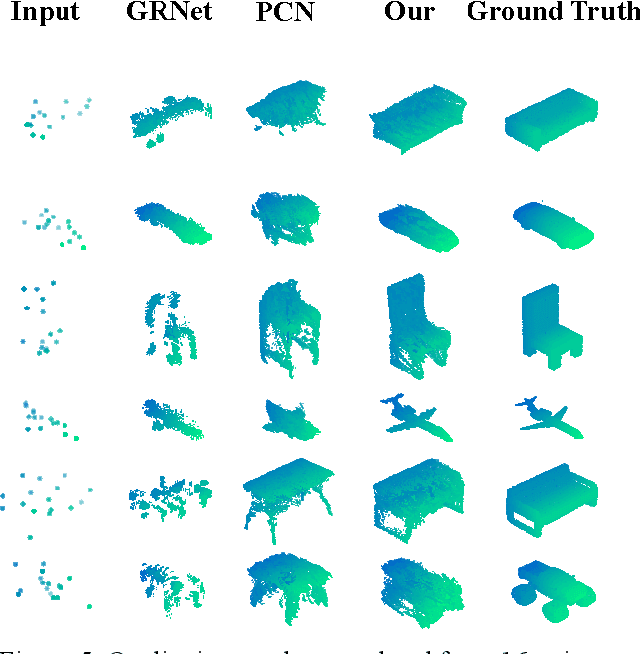
In many vision and robotics applications, it is common that the captured objects are represented by very few points. Most of the existing completion methods are designed for partial point clouds with many points, and they perform poorly or even fail completely in the case of few points. However, due to the lack of detail information, completing objects from few points faces a huge challenge. Inspired by the successful applications of GAN and Transformers in the image-based vision task, we introduce GAN and Transformer techniques to address the above problem. Firstly, the end-to-end encoder-decoder network with Transformers and the Wasserstein GAN with Transformer are pre-trained, and then the overall network is fine-tuned. Experimental results on the ShapeNet dataset show that our method can not only improve the completion performance for many input points, but also keep stable for few input points. Our source code is available at https://github.com/WxfQjh/Stability-point-recovery.git.