 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments
Jul 01, 2019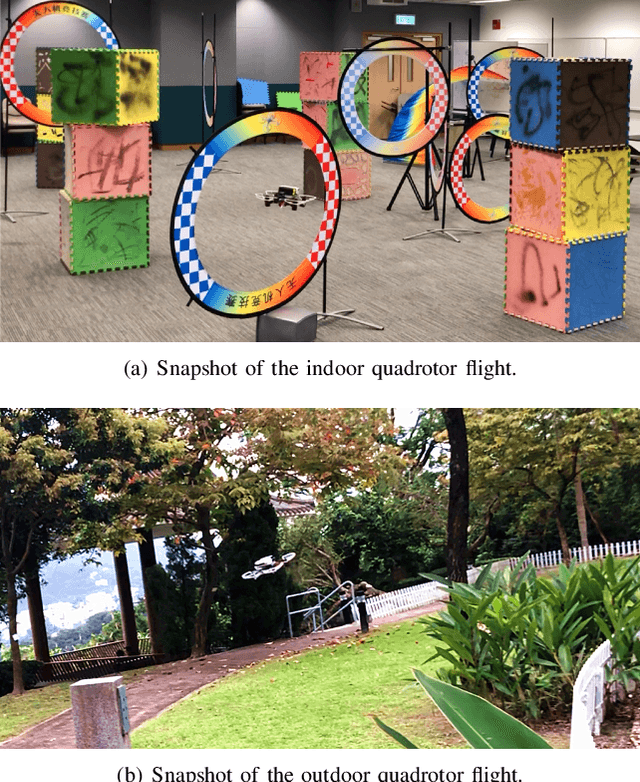

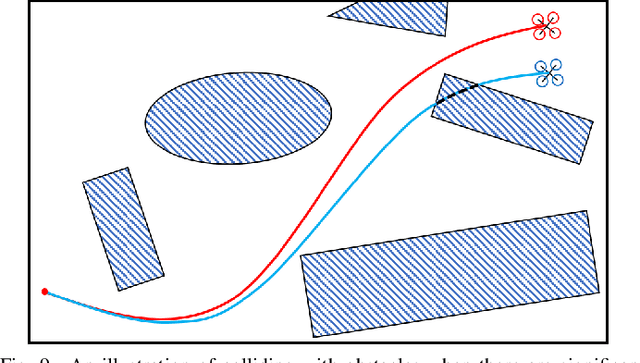
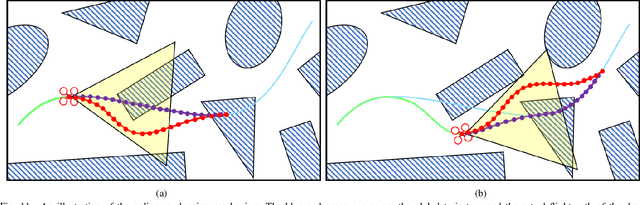
In this paper, we propose a complete and robust motion planning system for the aggressive flight of autonomous quadrotors. The proposed method is built upon on a classical teach-and-repeat framework, which is widely adopted in infrastructure inspection, aerial transportation, and search-and-rescue. For these applications, human's intention is essential to decide the topological structure of the flight trajectory of the drone. However, poor teaching trajectories and changing environments prevent a simple teach-and-repeat system from being applied flexibly and robustly. In this paper, instead of commanding the drone to precisely follow a teaching trajectory, we propose a method to automatically convert a human-piloted trajectory, which can be arbitrarily jerky, to a topologically equivalent one. The generated trajectory is guaranteed to be smooth, safe, and kinodynamically feasible, with a human preferable aggressiveness. Also, to avoid unmapped or dynamic obstacles during flights, a sliding-windowed local perception and re-planning method are introduced to our system, to generate safe local trajectories onboard. We name our system as teach-repeat-replan. It can capture users' intention of a flight mission, convert an arbitrarily jerky teaching path to a smooth repeating trajectory, and generate safe local re-plans to avoid unmapped or moving obstacles. The proposed planning system is integrated into a complete autonomous quadrotor with global and local perception and localization sub-modules. Our system is validated by performing aggressive flights in challenging indoor/outdoor environments. We release all components in our quadrotor system as open-source ros-packages.
FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial Robots
Mar 06, 2019
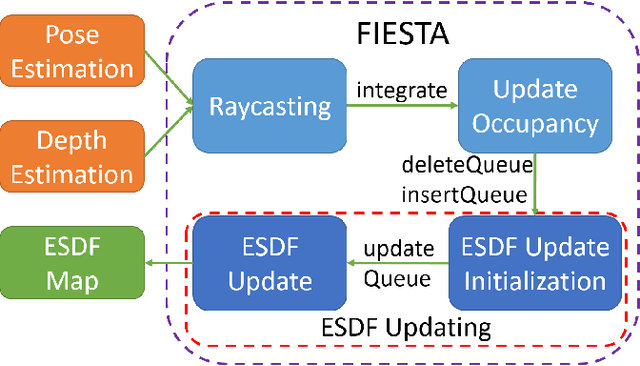


Euclidean Signed Distance Field (ESDF) is useful for online motion planning of aerial robots since it can easily query the distance and gradient information against obstacles. Fast incrementally built ESDF map is the bottleneck for conducting real-time motion planning. In this paper, we investigate this problem and propose a mapping system called FIESTA to build global ESDF map incrementally. By introducing two independent updating queues for inserting and deleting obstacles separately, and using Indexing Data Structures and Doubly Linked Lists for map maintenance, our algorithm updates as few as possible nodes using a BFS framework. Our ESDF map has high computational performance and produces near-optimal results. We show our method outperforms other up-to-date methods in term of performance and accuracy by both theory and experiments. We integrate FIESTA into a completed quadrotor system and validate it by both simulation and onboard experiments. We release our method as open-source software for the community.