 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperparameter Selection for Imitation Learning
May 25, 2021
We address the issue of tuning hyperparameters (HPs) for imitation learning algorithms in the context of continuous-control, when the underlying reward function of the demonstrating expert cannot be observed at any time. The vast literature in imitation learning mostly considers this reward function to be available for HP selection, but this is not a realistic setting. Indeed, would this reward function be available, it could then directly be used for policy training and imitation would not be necessary. To tackle this mostly ignored problem, we propose a number of possible proxies to the external reward. We evaluate them in an extensive empirical study (more than 10'000 agents across 9 environments) and make practical recommendations for selecting HPs. Our results show that while imitation learning algorithms are sensitive to HP choices, it is often possible to select good enough HPs through a proxy to the reward function.
Measuring Compositional Generalization: A Comprehensive Method on Realistic Data
Dec 20, 2019
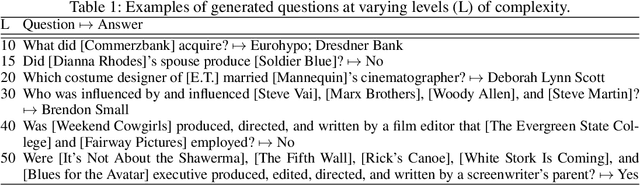
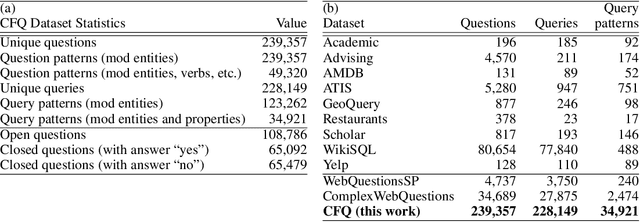
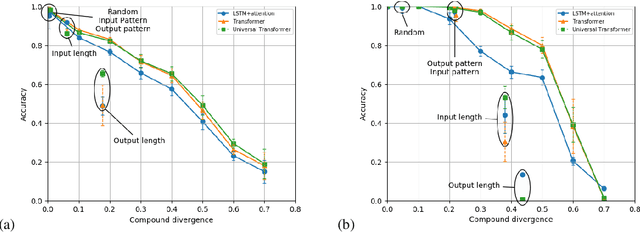
State-of-the-art machine learning methods exhibit limited compositional generalization. At the same time, there is a lack of realistic benchmarks that comprehensively measure this ability, which makes it challenging to find and evaluate improvements. We introduce a novel method to systematically construct such benchmarks by maximizing compound divergence while guaranteeing a small atom divergence between train and test sets, and we quantitatively compare this method to other approaches for creating compositional generalization benchmarks. We present a large and realistic natural language question answering dataset that is constructed according to this method, and we use it to analyze the compositional generalization ability of three machine learning architectures. We find that they fail to generalize compositionally and that there is a surprisingly strong negative correlation between compound divergence and accuracy. We also demonstrate how our method can be used to create new compositionality benchmarks on top of the existing SCAN dataset, which confirms these findings.