 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Learn from Risk: Explicit Risk-Utility Reinforcement Learning for Efficient and Safe Driving Strategies
Mar 16, 2022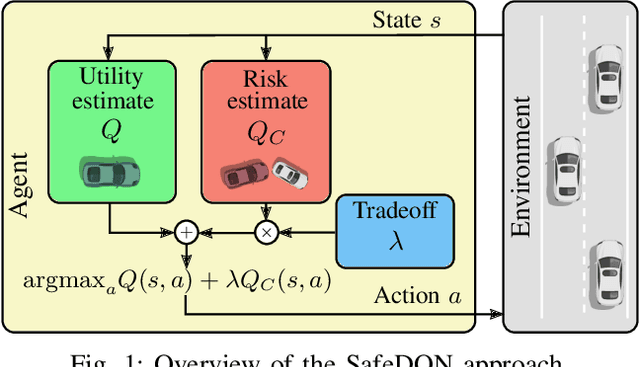
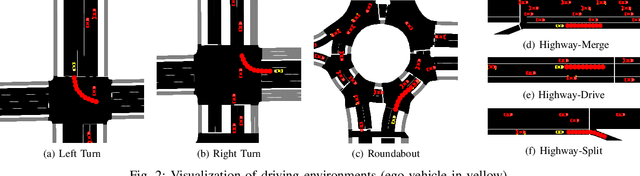
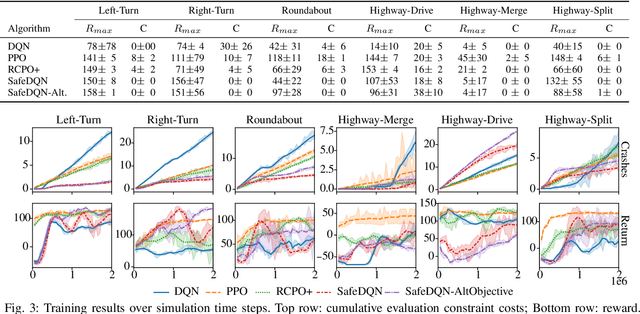
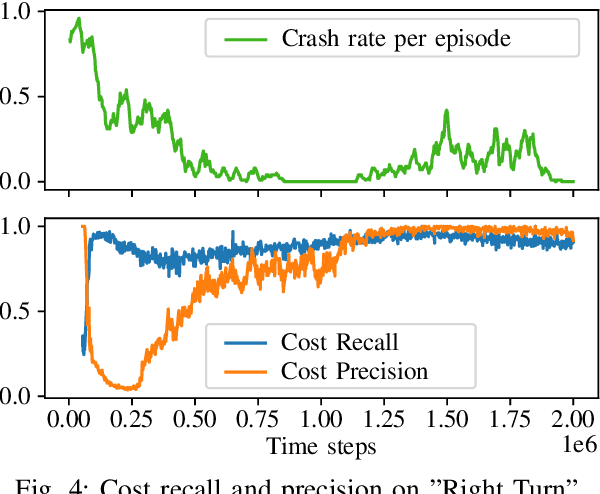
Autonomous driving has the potential to revolutionize mobility and is hence an active area of research. In practice, the behavior of autonomous vehicles must be acceptable, i.e., efficient, safe, and interpretable. While vanilla reinforcement learning (RL) finds performant behavioral strategies, they are often unsafe and uninterpretable. Safety is introduced through Safe RL approaches, but they still mostly remain uninterpretable as the learned behaviour is jointly optimized for safety and performance without modeling them separately. Interpretable machine learning is rarely applied to RL. This paper proposes SafeDQN, which allows to make the behavior of autonomous vehicles safe and interpretable while still being efficient. SafeDQN offers an understandable, semantic trade-off between the expected risk and the utility of actions while being algorithmically transparent. We show that SafeDQN finds interpretable and safe driving policies for a variety of scenarios and demonstrate how state-of-the-art saliency techniques can help to assess both risk and utility.
An Introduction to Multi-Agent Reinforcement Learning and Review of its Application to Autonomous Mobility
Mar 15, 2022
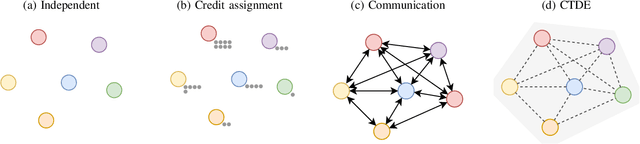
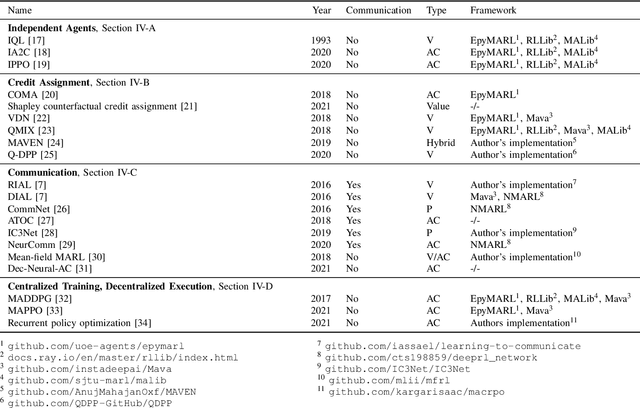
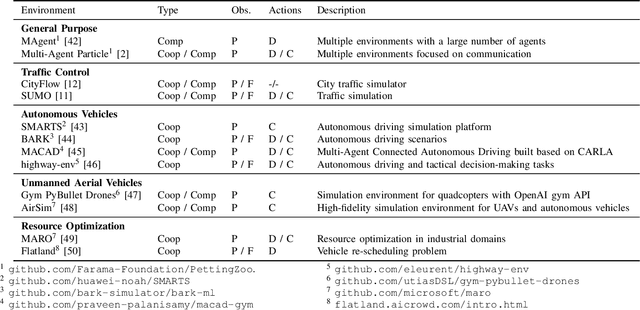
Many scenarios in mobility and traffic involve multiple different agents that need to cooperate to find a joint solution. Recent advances in behavioral planning use Reinforcement Learning to find effective and performant behavior strategies. However, as autonomous vehicles and vehicle-to-X communications become more mature, solutions that only utilize single, independent agents leave potential performance gains on the road. Multi-Agent Reinforcement Learning (MARL) is a research field that aims to find optimal solutions for multiple agents that interact with each other. This work aims to give an overview of the field to researchers in autonomous mobility. We first explain MARL and introduce important concepts. Then, we discuss the central paradigms that underlie MARL algorithms, and give an overview of state-of-the-art methods and ideas in each paradigm. With this background, we survey applications of MARL in autonomous mobility scenarios and give an overview of existing scenarios and implementations.