 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Interaction-Aware Dynamical Models and Decision Making for Autonomous Vehicles
Oct 31, 2023Interaction-aware Autonomous Driving (IAAD) is a rapidly growing field of research that focuses on the development of autonomous vehicles (AVs) that are capable of interacting safely and efficiently with human road users. This is a challenging task, as it requires the autonomous vehicle to be able to understand and predict the behaviour of human road users. In this literature review, the current state of IAAD research is surveyed in this work. Commencing with an examination of terminology, attention is drawn to challenges and existing models employed for modelling the behaviour of drivers and pedestrians. Next, a comprehensive review is conducted on various techniques proposed for interaction modelling, encompassing cognitive methods, machine learning approaches, and game-theoretic methods. The conclusion is reached through a discussion of potential advantages and risks associated with IAAD, along with the illumination of pivotal research inquiries necessitating future exploration.
Interaction-aware Decision-making for Automated Vehicles using Social Value Orientation
Jul 12, 2022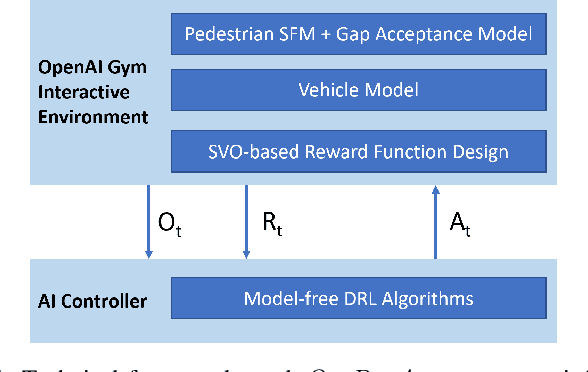
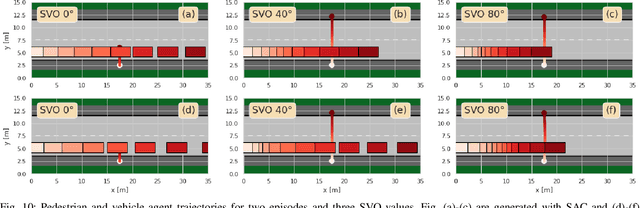
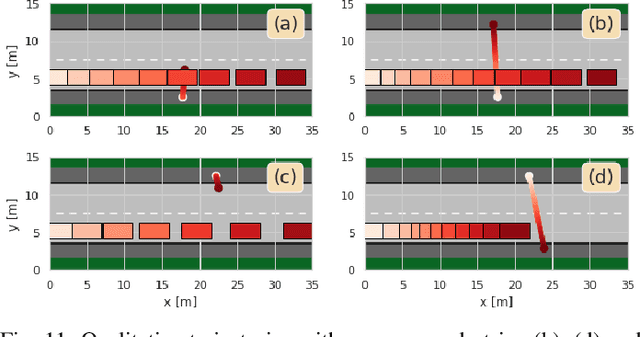
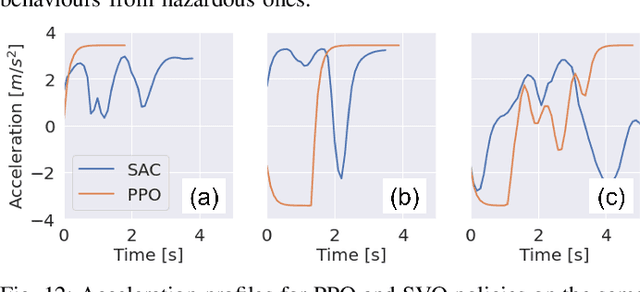
Motion control algorithms in the presence of pedestrians are critical for the development of safe and reliable Autonomous Vehicles (AVs). Traditional motion control algorithms rely on manually designed decision-making policies which neglect the mutual interactions between AVs and pedestrians. On the other hand, recent advances in Deep Reinforcement Learning allow for the automatic learning of policies without manual designs. To tackle the problem of decision-making in the presence of pedestrians, the authors introduce a framework based on Social Value Orientation and Deep Reinforcement Learning (DRL) that is capable of generating decision-making policies with different driving styles. The policy is trained using state-of-the-art DRL algorithms in a simulated environment. A novel computationally-efficient pedestrian model that is suitable for DRL training is also introduced. We perform experiments to validate our framework and we conduct a comparative analysis of the policies obtained with two different model-free Deep Reinforcement Learning Algorithms. Simulations results show how the developed model exhibits natural driving behaviours, such as short-stopping, to facilitate the pedestrian's crossing.