 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSC-OmniGS: Self-Calibrating Omnidirectional Gaussian Splatting
Feb 07, 2025



360-degree cameras streamline data collection for radiance field 3D reconstruction by capturing comprehensive scene data. However, traditional radiance field methods do not address the specific challenges inherent to 360-degree images. We present SC-OmniGS, a novel self-calibrating omnidirectional Gaussian splatting system for fast and accurate omnidirectional radiance field reconstruction using 360-degree images. Rather than converting 360-degree images to cube maps and performing perspective image calibration, we treat 360-degree images as a whole sphere and derive a mathematical framework that enables direct omnidirectional camera pose calibration accompanied by 3D Gaussians optimization. Furthermore, we introduce a differentiable omnidirectional camera model in order to rectify the distortion of real-world data for performance enhancement. Overall, the omnidirectional camera intrinsic model, extrinsic poses, and 3D Gaussians are jointly optimized by minimizing weighted spherical photometric loss. Extensive experiments have demonstrated that our proposed SC-OmniGS is able to recover a high-quality radiance field from noisy camera poses or even no pose prior in challenging scenarios characterized by wide baselines and non-object-centric configurations. The noticeable performance gain in the real-world dataset captured by consumer-grade omnidirectional cameras verifies the effectiveness of our general omnidirectional camera model in reducing the distortion of 360-degree images.
OmniGS: Omnidirectional Gaussian Splatting for Fast Radiance Field Reconstruction using Omnidirectional Images
Apr 08, 2024Photorealistic reconstruction relying on 3D Gaussian Splatting has shown promising potential in robotics. However, the current 3D Gaussian Splatting system only supports radiance field reconstruction using undistorted perspective images. In this paper, we present OmniGS, a novel omnidirectional Gaussian splatting system, to take advantage of omnidirectional images for fast radiance field reconstruction. Specifically, we conduct a theoretical analysis of spherical camera model derivatives in 3D Gaussian Splatting. According to the derivatives, we then implement a new GPU-accelerated omnidirectional rasterizer that directly splats 3D Gaussians onto the equirectangular screen space for omnidirectional image rendering. As a result, we realize differentiable optimization of the radiance field without the requirement of cube-map rectification or tangent-plane approximation. Extensive experiments conducted in egocentric and roaming scenarios demonstrate that our method achieves state-of-the-art reconstruction quality and high rendering speed using omnidirectional images. To benefit the research community, the code will be made publicly available once the paper is published.
Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular, Stereo, and RGB-D Cameras
Nov 28, 2023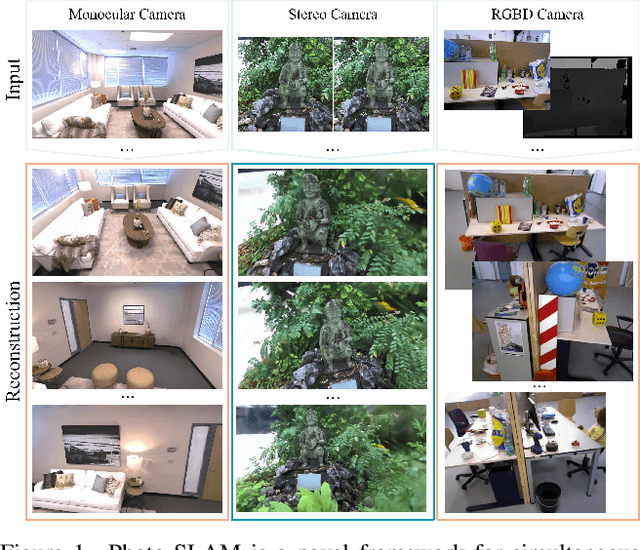
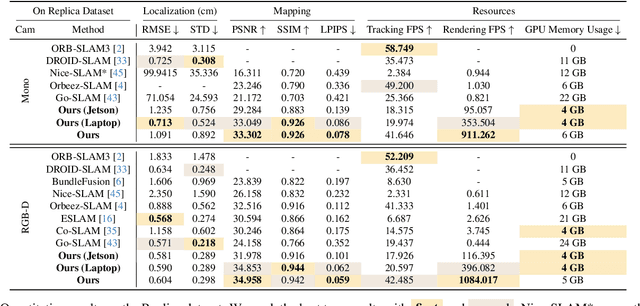
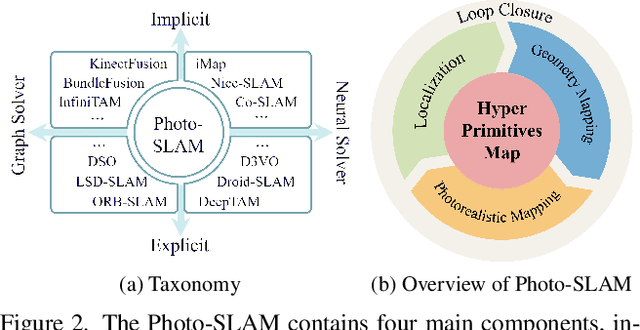
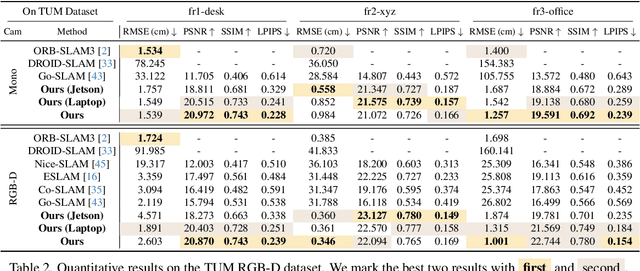
The integration of neural rendering and the SLAM system recently showed promising results in joint localization and photorealistic view reconstruction. However, existing methods, fully relying on implicit representations, are so resource-hungry that they cannot run on portable devices, which deviates from the original intention of SLAM. In this paper, we present Photo-SLAM, a novel SLAM framework with a hyper primitives map. Specifically, we simultaneously exploit explicit geometric features for localization and learn implicit photometric features to represent the texture information of the observed environment. In addition to actively densifying hyper primitives based on geometric features, we further introduce a Gaussian-Pyramid-based training method to progressively learn multi-level features, enhancing photorealistic mapping performance. The extensive experiments with monocular, stereo, and RGB-D datasets prove that our proposed system Photo-SLAM significantly outperforms current state-of-the-art SLAM systems for online photorealistic mapping, e.g., PSNR is 30% higher and rendering speed is hundreds of times faster in the Replica dataset. Moreover, the Photo-SLAM can run at real-time speed using an embedded platform such as Jetson AGX Orin, showing the potential of robotics applications.