 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNDT-Map-Code: A 3D global descriptor for real-time loop closure detection in lidar SLAM
Jul 17, 2023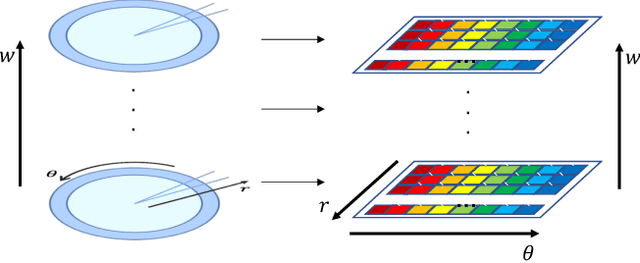

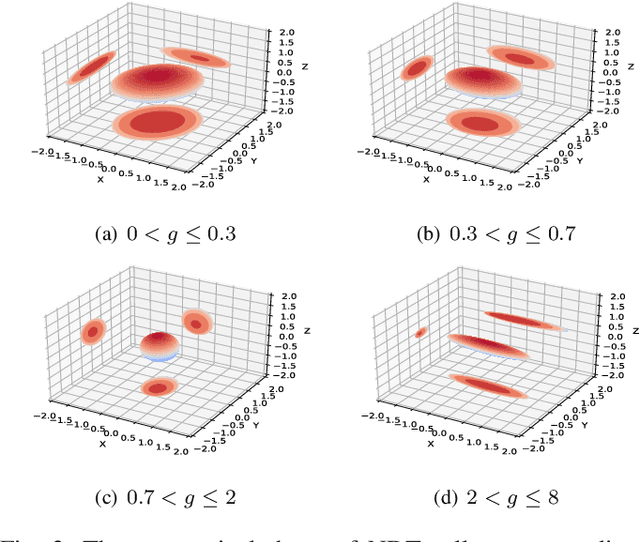

Loop-closure detection, also known as place recognition, aiming to identify previously visited locations, is an essential component of a SLAM system. Existing research on lidar-based loop closure heavily relies on dense point cloud and 360 FOV lidars. This paper proposes an out-of-the-box NDT (Normal Distribution Transform) based global descriptor, NDT-Map-Code, designed for both on-road driving and underground valet parking scenarios. NDT-Map-Code can be directly extracted from the NDT map without the need for a dense point cloud, resulting in excellent scalability and low maintenance cost. The NDT representation is leveraged to identify representative patterns, which are further encoded according to their spatial location (bearing, range, and height). Experimental results on the NIO underground parking lot dataset and the KITTI dataset demonstrate that our method achieves significantly better performance compared to the state-of-the-art.
Optimized SC-F-LOAM: Optimized Fast LiDAR Odometry and Mapping Using Scan Context
Apr 11, 2022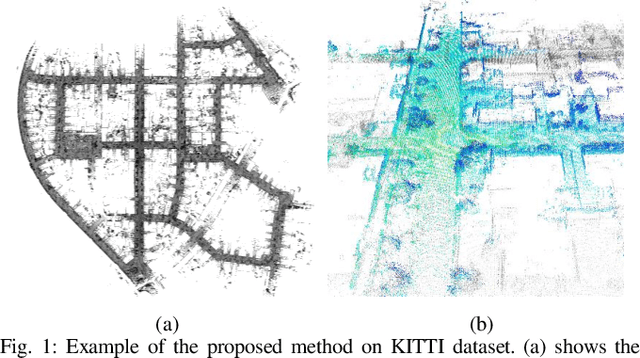
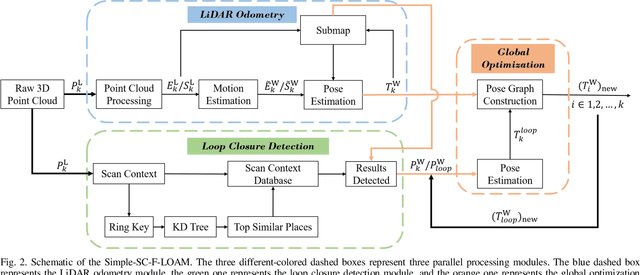
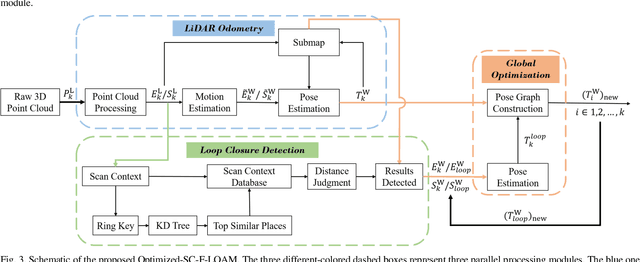

LiDAR odometry can achieve accurate vehicle pose estimation for short driving range or in small-scale environments, but for long driving range or in large-scale environments, the accuracy deteriorates as a result of cumulative estimation errors. This drawback necessitates the inclusion of loop closure detection in a SLAM framework to suppress the adverse effects of cumulative errors. To improve the accuracy of pose estimation, we propose a new LiDAR-based SLAM method which uses F-LOAM as LiDAR odometry, Scan Context for loop closure detection, and GTSAM for global optimization. In our approach, an adaptive distance threshold (instead of a fixed threshold) is employed for loop closure detection, which achieves more accurate loop closure detection results. Besides, a feature-based matching method is used in our approach to compute vehicle pose transformations between loop closure point cloud pairs, instead of using the raw point cloud obtained by the LiDAR sensor, which significantly reduces the computation time. The KITTI dataset and a UGV platform are used for verifications of our method, and the experimental results demonstrate that the proposed method outperforms typical LiDAR odometry/SLAM methods in the literature. Our code is made publicly available for the benefit of the community.