 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReflexDiffusion: Reflection-Enhanced Trajectory Planning for High-lateral-acceleration Scenarios in Autonomous Driving
Jan 14, 2026Generating safe and reliable trajectories for autonomous vehicles in long-tail scenarios remains a significant challenge, particularly for high-lateral-acceleration maneuvers such as sharp turns, which represent critical safety situations. Existing trajectory planners exhibit systematic failures in these scenarios due to data imbalance. This results in insufficient modelling of vehicle dynamics, road geometry, and environmental constraints in high-risk situations, leading to suboptimal or unsafe trajectory prediction when vehicles operate near their physical limits. In this paper, we introduce ReflexDiffusion, a novel inference-stage framework that enhances diffusion-based trajectory planners through reflective adjustment. Our method introduces a gradient-based adjustment mechanism during the iterative denoising process: after each standard trajectory update, we compute the gradient between the conditional and unconditional noise predictions to explicitly amplify critical conditioning signals, including road curvature and lateral vehicle dynamics. This amplification enforces strict adherence to physical constraints, particularly improving stability during high-lateral-acceleration maneuvers where precise vehicle-road interaction is paramount. Evaluated on the nuPlan Test14-hard benchmark, ReflexDiffusion achieves a 14.1% improvement in driving score for high-lateral-acceleration scenarios over the state-of-the-art (SOTA) methods. This demonstrates that inference-time trajectory optimization can effectively compensate for training data sparsity by dynamically reinforcing safety-critical constraints near handling limits. The framework's architecture-agnostic design enables direct deployment to existing diffusion-based planners, offering a practical solution for improving autonomous vehicle safety in challenging driving conditions.
Embodied Active Defense: Leveraging Recurrent Feedback to Counter Adversarial Patches
Mar 31, 2024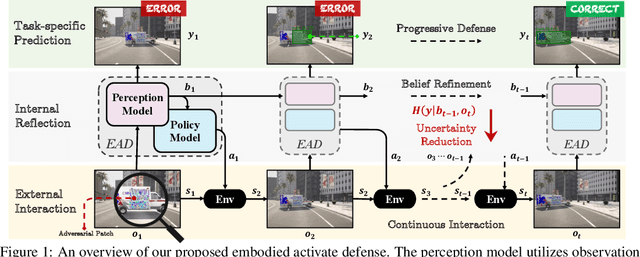



The vulnerability of deep neural networks to adversarial patches has motivated numerous defense strategies for boosting model robustness. However, the prevailing defenses depend on single observation or pre-established adversary information to counter adversarial patches, often failing to be confronted with unseen or adaptive adversarial attacks and easily exhibiting unsatisfying performance in dynamic 3D environments. Inspired by active human perception and recurrent feedback mechanisms, we develop Embodied Active Defense (EAD), a proactive defensive strategy that actively contextualizes environmental information to address misaligned adversarial patches in 3D real-world settings. To achieve this, EAD develops two central recurrent sub-modules, i.e., a perception module and a policy module, to implement two critical functions of active vision. These models recurrently process a series of beliefs and observations, facilitating progressive refinement of their comprehension of the target object and enabling the development of strategic actions to counter adversarial patches in 3D environments. To optimize learning efficiency, we incorporate a differentiable approximation of environmental dynamics and deploy patches that are agnostic to the adversary strategies. Extensive experiments demonstrate that EAD substantially enhances robustness against a variety of patches within just a few steps through its action policy in safety-critical tasks (e.g., face recognition and object detection), without compromising standard accuracy. Furthermore, due to the attack-agnostic characteristic, EAD facilitates excellent generalization to unseen attacks, diminishing the averaged attack success rate by 95 percent across a range of unseen adversarial attacks.