 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAACP: Aesthetics assessment of children's paintings based on self-supervised learning
Mar 12, 2024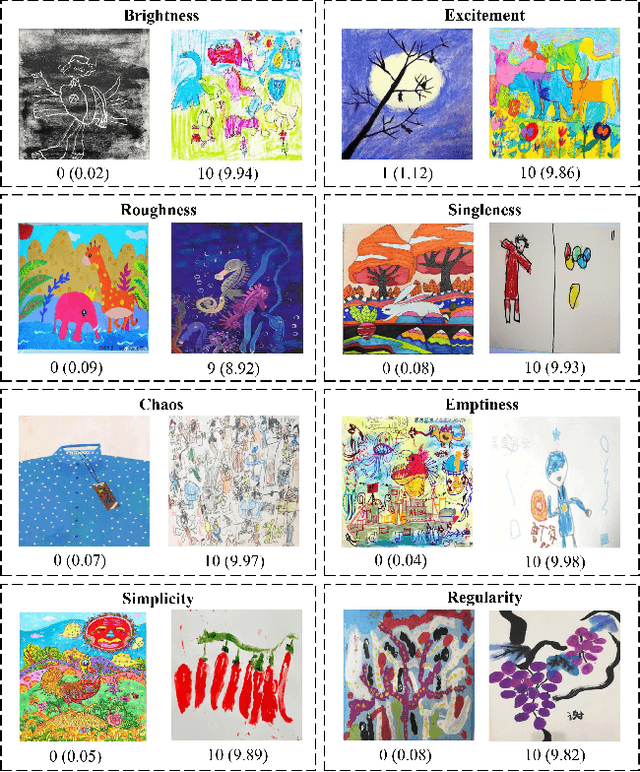
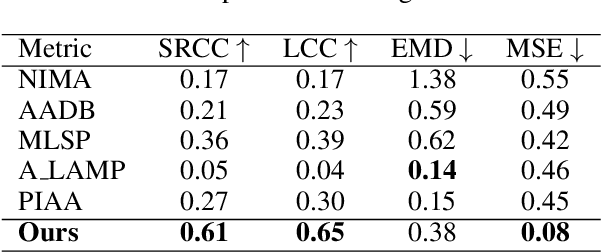
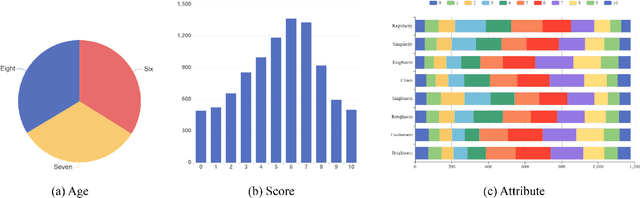
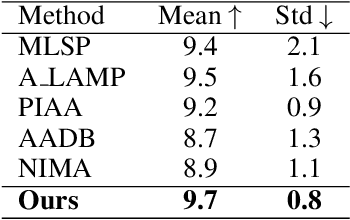
The Aesthetics Assessment of Children's Paintings (AACP) is an important branch of the image aesthetics assessment (IAA), playing a significant role in children's education. This task presents unique challenges, such as limited available data and the requirement for evaluation metrics from multiple perspectives. However, previous approaches have relied on training large datasets and subsequently providing an aesthetics score to the image, which is not applicable to AACP. To solve this problem, we construct an aesthetics assessment dataset of children's paintings and a model based on self-supervised learning. 1) We build a novel dataset composed of two parts: the first part contains more than 20k unlabeled images of children's paintings; the second part contains 1.2k images of children's paintings, and each image contains eight attributes labeled by multiple design experts. 2) We design a pipeline that includes a feature extraction module, perception modules and a disentangled evaluation module. 3) We conduct both qualitative and quantitative experiments to compare our model's performance with five other methods using the AACP dataset. Our experiments reveal that our method can accurately capture aesthetic features and achieve state-of-the-art performance.
Consensus-Based Distributed Nonlinear Filtering with Kernel Mean Embedding
Dec 04, 2023This paper proposes a consensus-based distributed nonlinear filter with kernel mean embedding (KME). This fills with gap of posterior density approximation with KME for distributed nonlinear dynamic systems. To approximate the posterior density, the system state is embedded into a higher-dimensional reproducing kernel Hilbert space (RKHS), and then the nonlinear measurement function is linearly converted. As a result, an update rule of KME of posterior distribution is established in the RKHS. To show the proposed distributed filter being capable of achieving the centralized estimation accuracy, a centralized filter, serving as an extension of the standard Kalman filter in the state space to the RKHS, is developed first. Benefited from the KME, the proposed distributed filter converges to the centralized one while maintaining the distributed pattern. Two examples are introduced to demonstrate the effectiveness of the developed filters in target tracking scenarios including nearly constantly moving target and turning target, respectively, with bearing-only, range and bearing measurements.