 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-scale single-photon imaging
Dec 28, 2022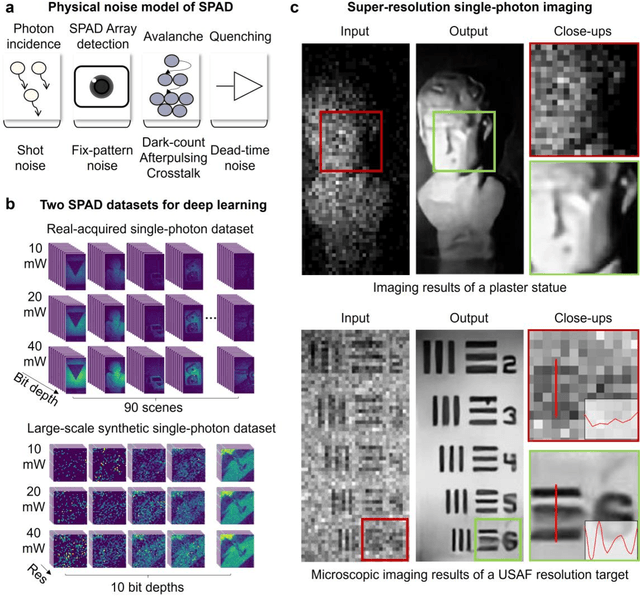
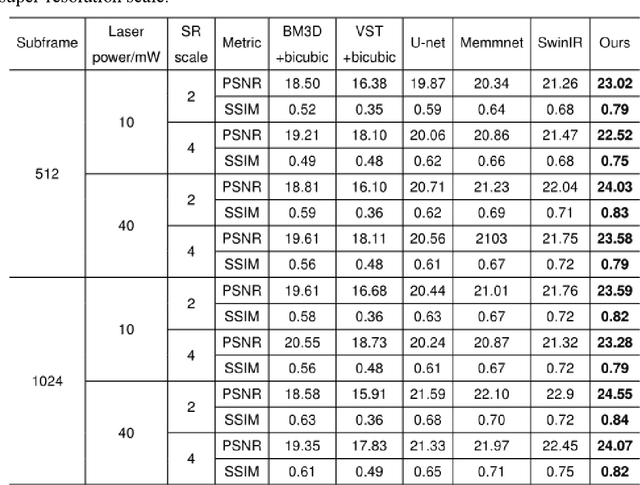

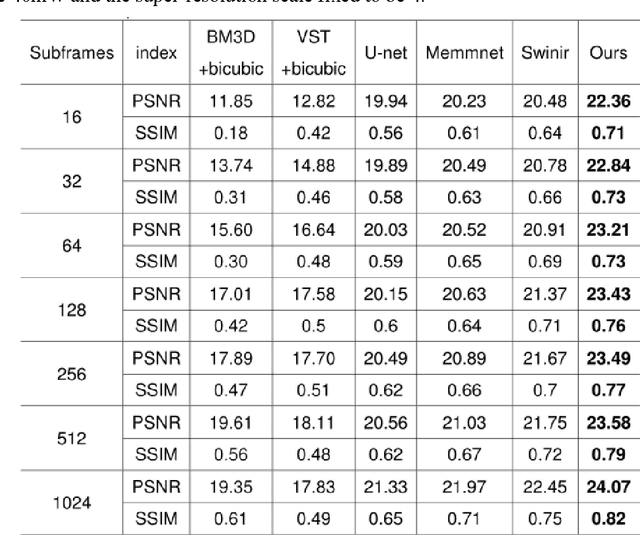
Benefiting from its single-photon sensitivity, single-photon avalanche diode (SPAD) array has been widely applied in various fields such as fluorescence lifetime imaging and quantum computing. However, large-scale high-fidelity single-photon imaging remains a big challenge, due to the complex hardware manufacture craft and heavy noise disturbance of SPAD arrays. In this work, we introduce deep learning into SPAD, enabling super-resolution single-photon imaging over an order of magnitude, with significant enhancement of bit depth and imaging quality. We first studied the complex photon flow model of SPAD electronics to accurately characterize multiple physical noise sources, and collected a real SPAD image dataset (64 $\times$ 32 pixels, 90 scenes, 10 different bit depth, 3 different illumination flux, 2790 images in total) to calibrate noise model parameters. With this real-world physical noise model, we for the first time synthesized a large-scale realistic single-photon image dataset (image pairs of 5 different resolutions with maximum megapixels, 17250 scenes, 10 different bit depth, 3 different illumination flux, 2.6 million images in total) for subsequent network training. To tackle the severe super-resolution challenge of SPAD inputs with low bit depth, low resolution, and heavy noise, we further built a deep transformer network with a content-adaptive self-attention mechanism and gated fusion modules, which can dig global contextual features to remove multi-source noise and extract full-frequency details. We applied the technique on a series of experiments including macroscopic and microscopic imaging, microfluidic inspection, and Fourier ptychography. The experiments validate the technique's state-of-the-art super-resolution SPAD imaging performance, with more than 5 dB superiority on PSNR compared to the existing methods.
U-shape Transformer for Underwater Image Enhancement
Dec 03, 2021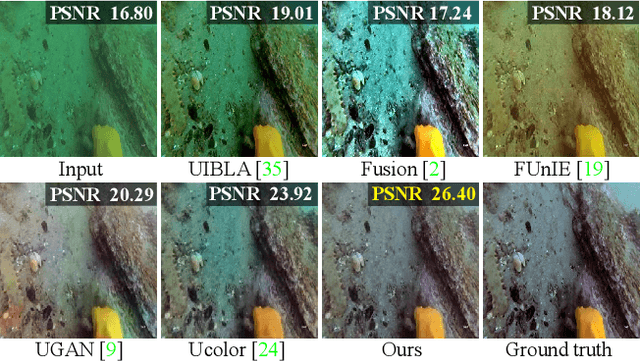
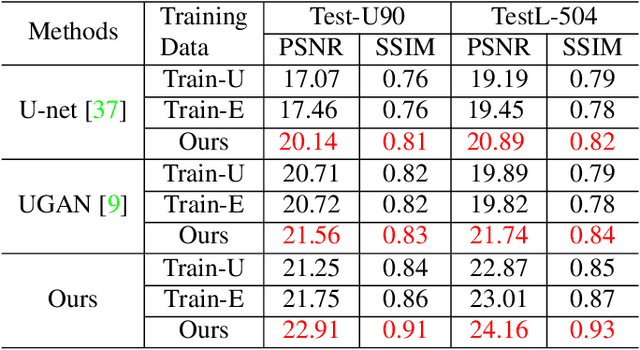
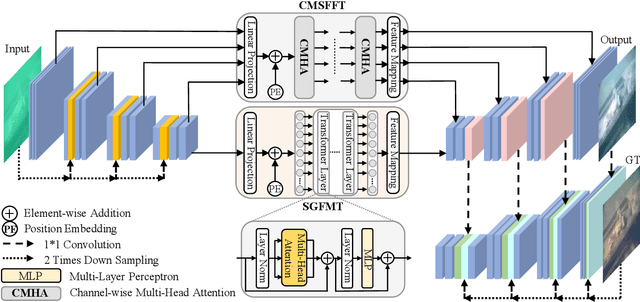
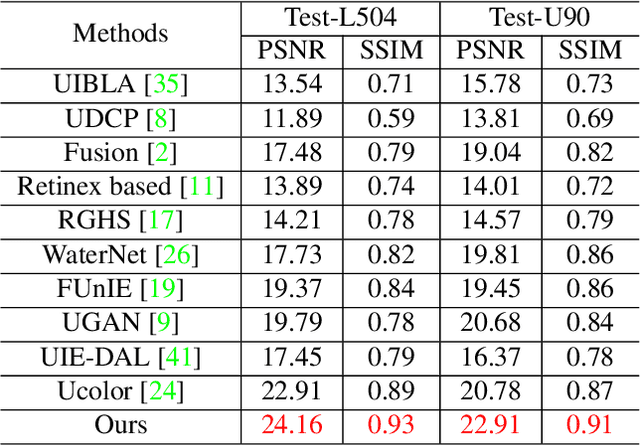
The light absorption and scattering of underwater impurities lead to poor underwater imaging quality. The existing data-driven based underwater image enhancement (UIE) techniques suffer from the lack of a large-scale dataset containing various underwater scenes and high-fidelity reference images. Besides, the inconsistent attenuation in different color channels and space areas is not fully considered for boosted enhancement. In this work, we constructed a large-scale underwater image (LSUI) dataset including 5004 image pairs, and reported an U-shape Transformer network where the transformer model is for the first time introduced to the UIE task. The U-shape Transformer is integrated with a channel-wise multi-scale feature fusion transformer (CMSFFT) module and a spatial-wise global feature modeling transformer (SGFMT) module, which reinforce the network's attention to the color channels and space areas with more serious attenuation. Meanwhile, in order to further improve the contrast and saturation, a novel loss function combining RGB, LAB and LCH color spaces is designed following the human vision principle. The extensive experiments on available datasets validate the state-of-the-art performance of the reported technique with more than 2dB superiority.
Agile wide-field imaging with selective high resolution
Jun 11, 2021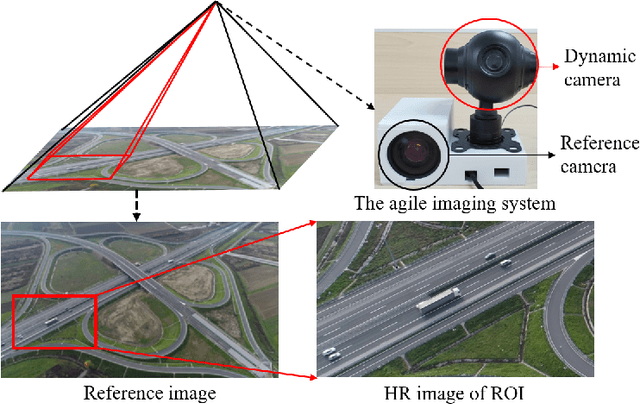
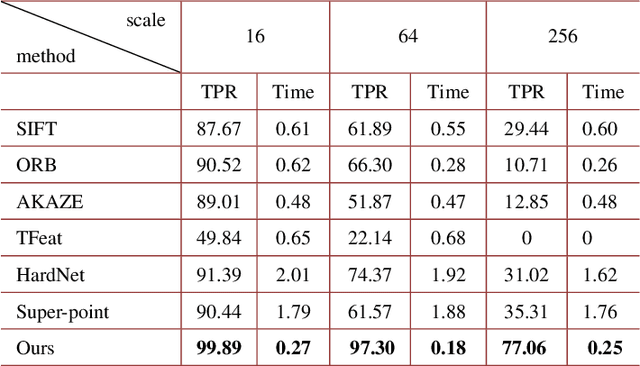
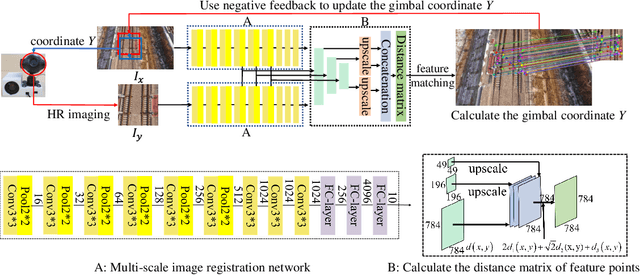
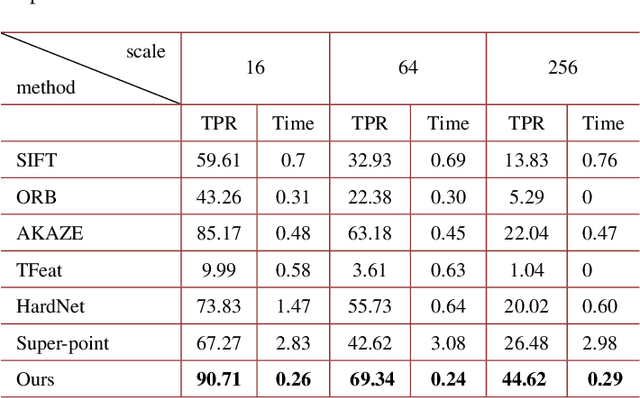
Wide-field and high-resolution (HR) imaging is essential for various applications such as aviation reconnaissance, topographic mapping and safety monitoring. The existing techniques require a large-scale detector array to capture HR images of the whole field, resulting in high complexity and heavy cost. In this work, we report an agile wide-field imaging framework with selective high resolution that requires only two detectors. It builds on the statistical sparsity prior of natural scenes that the important targets locate only at small regions of interests (ROI), instead of the whole field. Under this assumption, we use a short-focal camera to image wide field with a certain low resolution, and use a long-focal camera to acquire the HR images of ROI. To automatically locate ROI in the wide field in real time, we propose an efficient deep-learning based multiscale registration method that is robust and blind to the large setting differences (focal, white balance, etc) between the two cameras. Using the registered location, the long-focal camera mounted on a gimbal enables real-time tracking of the ROI for continuous HR imaging. We demonstrated the novel imaging framework by building a proof-of-concept setup with only 1181 gram weight, and assembled it on an unmanned aerial vehicle for air-to-ground monitoring. Experiments show that the setup maintains 120$^{\circ}$ wide field-of-view (FOV) with selective 0.45$mrad$ instantaneous FOV.