 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Continuous Locomotion Modes via Multidimensional Feature Learning from sEMG
Nov 13, 2023



Walking-assistive devices require adaptive control methods to ensure smooth transitions between various modes of locomotion. For this purpose, detecting human locomotion modes (e.g., level walking or stair ascent) in advance is crucial for improving the intelligence and transparency of such robotic systems. This study proposes Deep-STF, a unified end-to-end deep learning model designed for integrated feature extraction in spatial, temporal, and frequency dimensions from surface electromyography (sEMG) signals. Our model enables accurate and robust continuous prediction of nine locomotion modes and 15 transitions at varying prediction time intervals, ranging from 100 to 500 ms. In addition, we introduced the concept of 'stable prediction time' as a distinct metric to quantify prediction efficiency. This term refers to the duration during which consistent and accurate predictions of mode transitions are made, measured from the time of the fifth correct prediction to the occurrence of the critical event leading to the task transition. This distinction between stable prediction time and prediction time is vital as it underscores our focus on the precision and reliability of mode transition predictions. Experimental results showcased Deep-STP's cutting-edge prediction performance across diverse locomotion modes and transitions, relying solely on sEMG data. When forecasting 100 ms ahead, Deep-STF surpassed CNN and other machine learning techniques, achieving an outstanding average prediction accuracy of 96.48%. Even with an extended 500 ms prediction horizon, accuracy only marginally decreased to 93.00%. The averaged stable prediction times for detecting next upcoming transitions spanned from 28.15 to 372.21 ms across the 100-500 ms time advances.
Recognition of Oracle Bone Inscriptions by using Two Deep Learning Models
May 04, 2021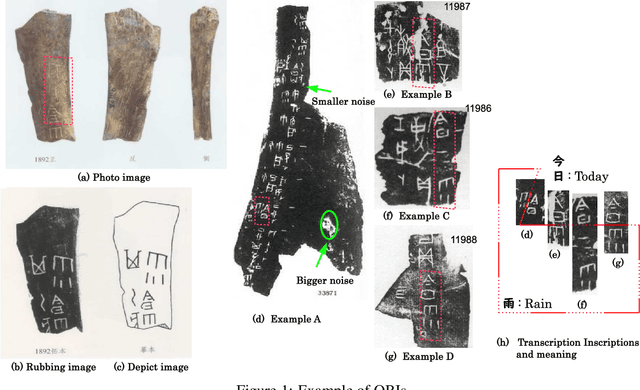
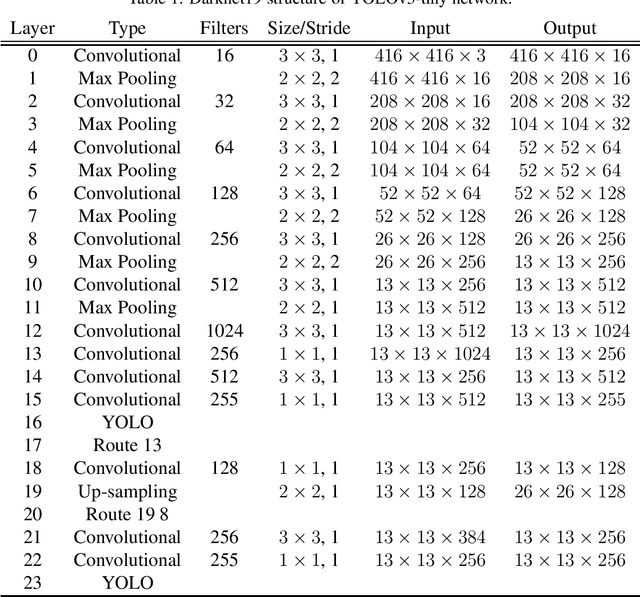


Oracle bone inscriptions (OBIs) contain some of the oldest characters in the world and were used in China about 3000 years ago. As an ancient form of literature, OBIs store a lot of information that can help us understand the world history, character evaluations, and more. However, as OBIs were found only discovered about 120 years ago, few studies have described them, and the aging process has made the inscriptions less legible. Hence, automatic character detection and recognition has become an important issue. This paper aims to design a online OBI recognition system for helping preservation and organization the cultural heritage. We evaluated two deep learning models for OBI recognition, and have designed an API that can be accessed online for OBI recognition. In the first stage, you only look once (YOLO) is applied for detecting and recognizing OBIs. However, not all of the OBIs can be detected correctly by YOLO, so we next utilize MobileNet to recognize the undetected OBIs by manually cropping the undetected OBI in the image. MobileNet is used for this second stage of recognition as our evaluation of ten state-of-the-art models showed that it is the best network for OBI recognition due to its superior performance in terms of accuracy, loss and time consumption. We installed our system on an application programming interface (API) and opened it for OBI detection and recognition.
GResNet: Graph Residual Network for Reviving Deep GNNs from Suspended Animation
Sep 24, 2019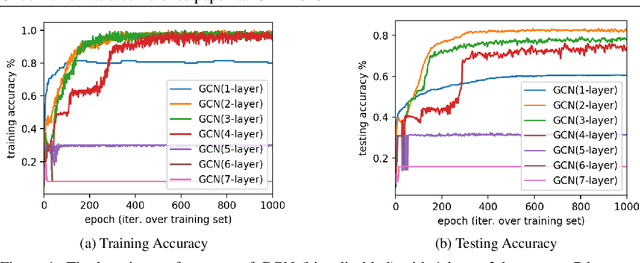
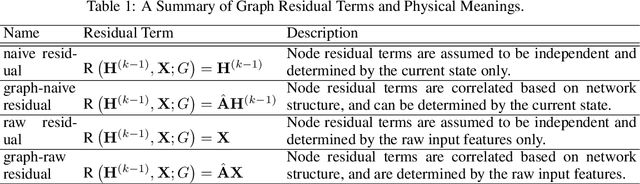
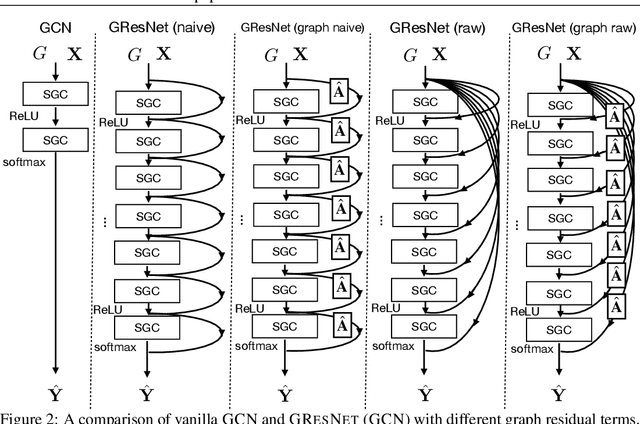
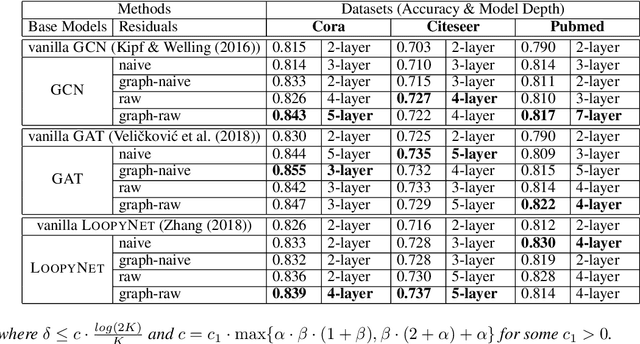
The existing graph neural networks (GNNs) based on the spectral graph convolutional operator have been criticized for its performance degradation, which is especially common for the models with deep architectures. In this paper, we further identify the suspended animation problem with the existing GNNs. Such a problem happens when the model depth reaches the suspended animation limit, and the model will not respond to the training data any more and become not learnable. Analysis about the causes of the suspended animation problem with existing GNNs will be provided in this paper, whereas several other peripheral factors that will impact the problem will be reported as well. To resolve the problem, we introduce the GResNet (Graph Residual Network) framework in this paper, which creates extensively connected highways to involve nodes' raw features or intermediate representations throughout the graph for all the model layers. Different from the other learning settings, the extensive connections in the graph data will render the existing simple residual learning methods fail to work. We prove the effectiveness of the introduced new graph residual terms from the norm preservation perspective, which will help avoid dramatic changes to the node's representations between sequential layers. Detailed studies about the GResNet framework for many existing GNNs, including GCN, GAT and LoopyNet, will be reported in the paper with extensive empirical experiments on real-world benchmark datasets.
Graph Neural Lasso for Dynamic Network Regression
Jul 25, 2019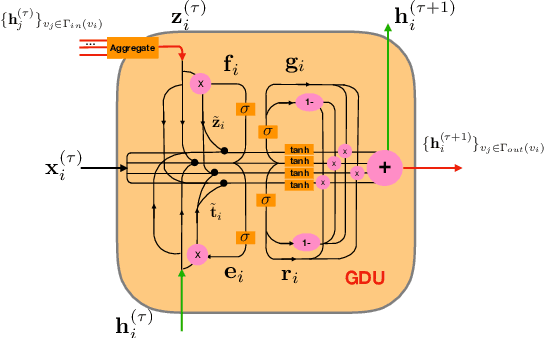

In this paper, we will study the dynamic network regression problem, which focuses on inferring both individual entities' changing attribute values and the dynamic relationships among the entities in the network data simultaneously. To resolve the problem, a novel graph neural network, namely graph neural lasso (GNL), will be proposed in this paper. To model the real-time changes of nodes in the network, GNL extends gated diffusive unit (GDU) to the regression scenario and uses it as the basic neuron unit. GNL can effectively model the dynamic relationships among the nodes based on an attention mechanism.
IsoNN: Isomorphic Neural Network for Graph Representation Learning and Classification
Jul 22, 2019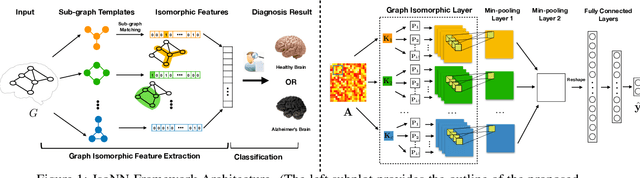
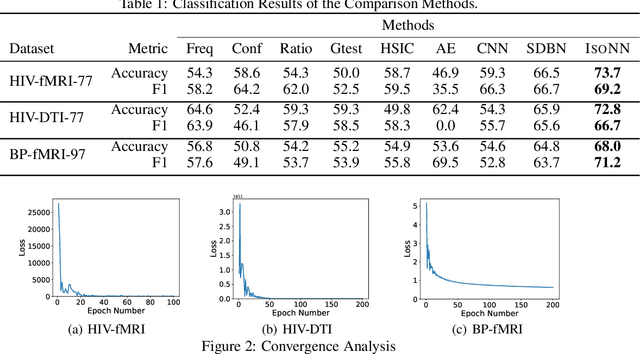
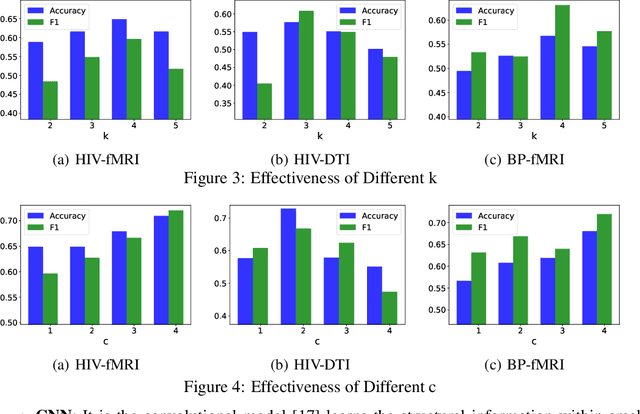
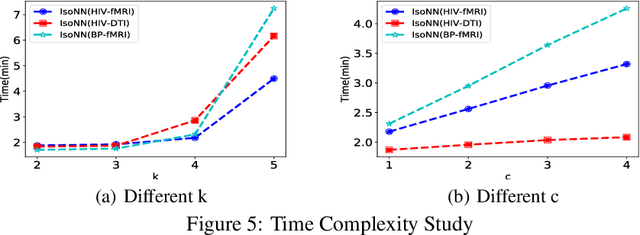
Deep learning models have achieved huge success in numerous fields, such as computer vision and natural language processing. However, unlike such fields, it is hard to apply traditional deep learning models on the graph data due to the `node-orderless' property. Normally, we use an adjacent matrix to represent a graph, but an artificial and random node-order will be cast on the graphs, which renders the performance of deep models extremely erratic and not robust. In order to eliminate the unnecessary node-order constraint, in this paper, we propose a novel model named Isomorphic Neural Network (IsoNN), which learns the graph representation by extracting its isomorphic features via the graph matching between input graph and templates. IsoNN has two main components: graph isomorphic feature extraction component and classification component. The graph isomorphic feature extraction component utilizes a set of subgraph templates as the kernel variables to learn the possible subgraph patterns existing in the input graph and then computes the isomorphic features. A set of permutation matrices is used in the component to break the node-order brought by the matrix representation. To further lower down the computational cost and identify the optimal subgraph patterns, IsoNN adopts two min-pooling layers to find the optimal matching. The first min-pooling layer aims at finding the best permutation matrix, whereas the second one is used to determine the best templates for the input graph data. Three fully-connected layers are used as the classification component in IsoNN. Extensive experiments are conducted on real-world datasets, and the experimental results demonstrate both the effectiveness and efficiency of IsoNN.