 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA survey on deep learning approaches for data integration in autonomous driving system
Jun 17, 2023
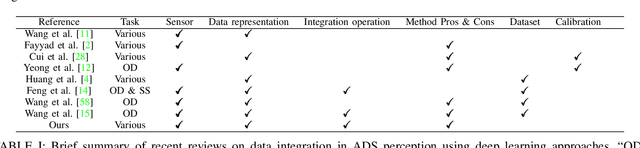


The perception module of self-driving vehicles relies on a multi-sensor system to understand its environment. Recent advancements in deep learning have led to the rapid development of approaches that integrate multi-sensory measurements to enhance perception capabilities. This paper surveys the latest deep learning integration techniques applied to the perception module in autonomous driving systems, categorizing integration approaches based on "what, how, and when to integrate." A new taxonomy of integration is proposed, based on three dimensions: multi-view, multi-modality, and multi-frame. The integration operations and their pros and cons are summarized, providing new insights into the properties of an "ideal" data integration approach that can alleviate the limitations of existing methods. After reviewing hundreds of relevant papers, this survey concludes with a discussion of the key features of an optimal data integration approach.