 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraining Robust Spiking Neural Networks with ViewPoint Transform and SpatioTemporal Stretching
Mar 14, 2023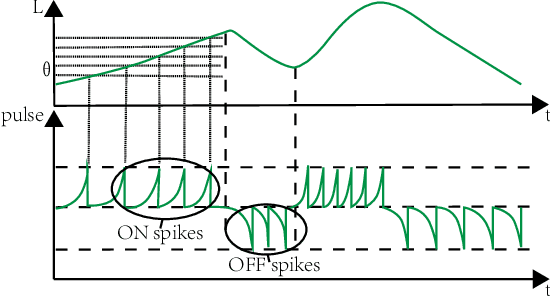
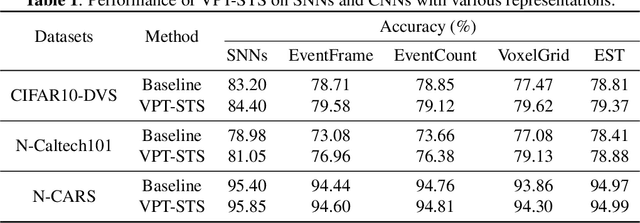
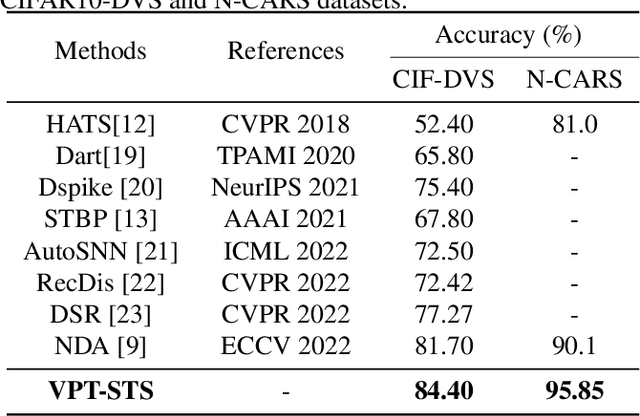
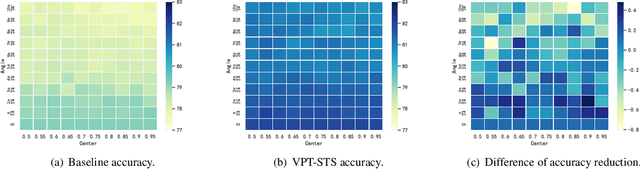
Neuromorphic vision sensors (event cameras) simulate biological visual perception systems and have the advantages of high temporal resolution, less data redundancy, low power consumption, and large dynamic range. Since both events and spikes are modeled from neural signals, event cameras are inherently suitable for spiking neural networks (SNNs), which are considered promising models for artificial intelligence (AI) and theoretical neuroscience. However, the unconventional visual signals of these cameras pose a great challenge to the robustness of spiking neural networks. In this paper, we propose a novel data augmentation method, ViewPoint Transform and SpatioTemporal Stretching (VPT-STS). It improves the robustness of SNNs by transforming the rotation centers and angles in the spatiotemporal domain to generate samples from different viewpoints. Furthermore, we introduce the spatiotemporal stretching to avoid potential information loss in viewpoint transformation. Extensive experiments on prevailing neuromorphic datasets demonstrate that VPT-STS is broadly effective on multi-event representations and significantly outperforms pure spatial geometric transformations. Notably, the SNNs model with VPT-STS achieves a state-of-the-art accuracy of 84.4\% on the DVS-CIFAR10 dataset.
Frequency and Scale Perspectives of Feature Extraction
Feb 24, 2023



Convolutional neural networks (CNNs) have achieved superior performance but still lack clarity about the nature and properties of feature extraction. In this paper, by analyzing the sensitivity of neural networks to frequencies and scales, we find that neural networks not only have low- and medium-frequency biases but also prefer different frequency bands for different classes, and the scale of objects influences the preferred frequency bands. These observations lead to the hypothesis that neural networks must learn the ability to extract features at various scales and frequencies. To corroborate this hypothesis, we propose a network architecture based on Gaussian derivatives, which extracts features by constructing scale space and employing partial derivatives as local feature extraction operators to separate high-frequency information. This manually designed method of extracting features from different scales allows our GSSDNets to achieve comparable accuracy with vanilla networks on various datasets.
Modeling Associative Plasticity between Synapses to Enhance Learning of Spiking Neural Networks
Jul 24, 2022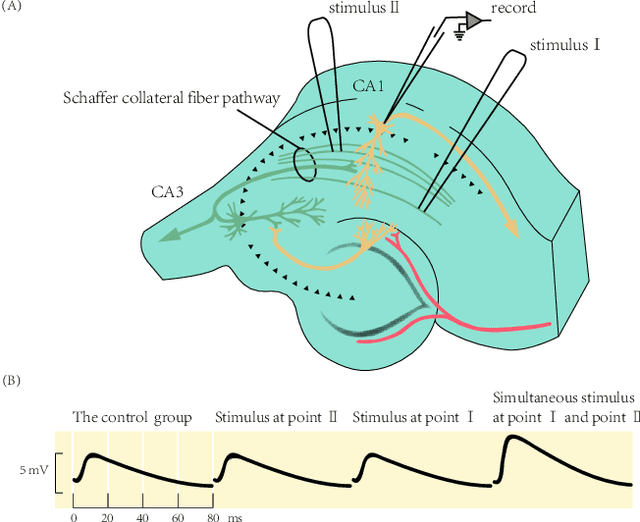
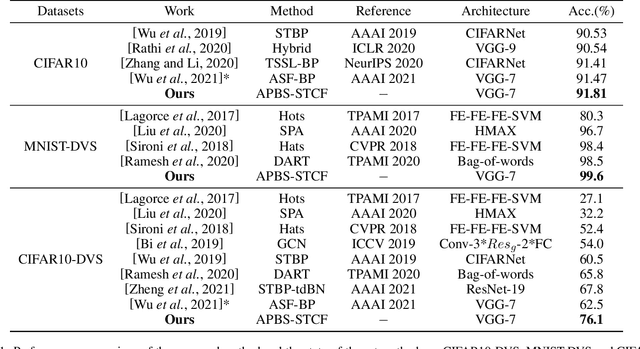
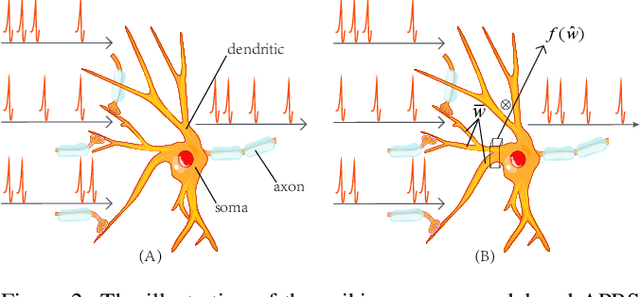
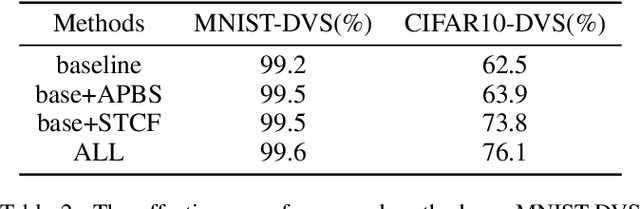
Spiking Neural Networks (SNNs) are the third generation of artificial neural networks that enable energy-efficient implementation on neuromorphic hardware. However, the discrete transmission of spikes brings significant challenges to the robust and high-performance learning mechanism. Most existing works focus solely on learning between neurons but ignore the influence between synapses, resulting in a loss of robustness and accuracy. To address this problem, we propose a robust and effective learning mechanism by modeling the associative plasticity between synapses (APBS) observed from the physiological phenomenon of associative long-term potentiation (ALTP). With the proposed APBS method, synapses of the same neuron interact through a shared factor when concurrently stimulated by other neurons. In addition, we propose a spatiotemporal cropping and flipping (STCF) method to improve the generalization ability of our network. Extensive experiments demonstrate that our approaches achieve superior performance on static CIFAR-10 datasets and state-of-the-art performance on neuromorphic MNIST-DVS, CIFAR10-DVS datasets by a lightweight convolution network. To our best knowledge, this is the first time to explore a learning method between synapses and an extended approach for neuromorphic data.
Improved Regularization of Event-based Learning by Reversing and Drifting
Jul 24, 2022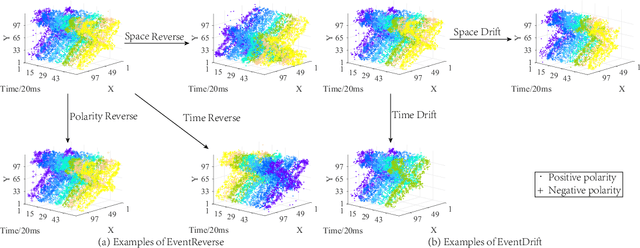
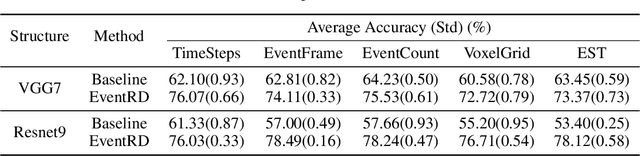
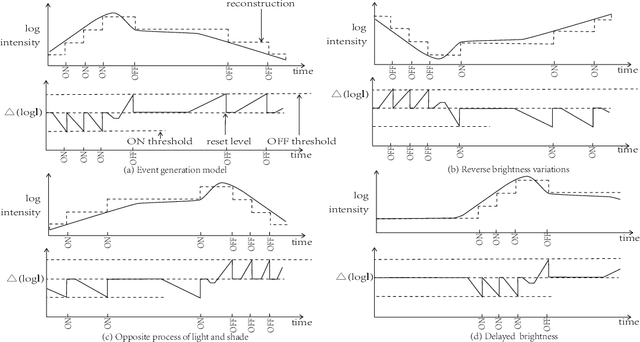
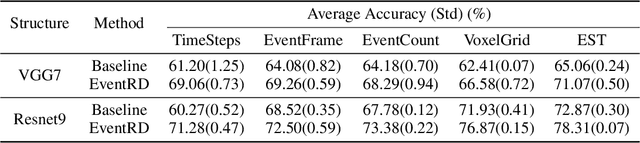
Event camera has an enormous potential in challenging scenes for its advantages of high temporal resolution, high dynamic range, low power consumption, and no motion blur. However, event-based learning is hindered by insufficient generalization ability. In this paper, we first analyze the influence of different brightness variations on event data. Then we propose two novel augmentation methods: EventReverse and EventDrift. By reversing and drifting events to their corresponding positions in the spatiotemporal or polarity domain, the proposed methods generate samples affected by different brightness variations, which improves the robustness of event-based learning and results in a better generalization. Extensive experiments on N-CARS, N-Caltech101 and CIFAR10-DVS datasets demonstrate that our method is general and remarkably effective.
Efficient CNN Architecture Design Guided by Visualization
Jul 21, 2022

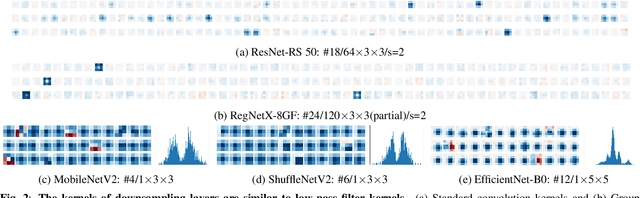

Modern efficient Convolutional Neural Networks(CNNs) always use Depthwise Separable Convolutions(DSCs) and Neural Architecture Search(NAS) to reduce the number of parameters and the computational complexity. But some inherent characteristics of networks are overlooked. Inspired by visualizing feature maps and N$\times$N(N$>$1) convolution kernels, several guidelines are introduced in this paper to further improve parameter efficiency and inference speed. Based on these guidelines, our parameter-efficient CNN architecture, called \textit{VGNetG}, achieves better accuracy and lower latency than previous networks with about 30%$\thicksim$50% parameters reduction. Our VGNetG-1.0MP achieves 67.7% top-1 accuracy with 0.99M parameters and 69.2% top-1 accuracy with 1.14M parameters on ImageNet classification dataset. Furthermore, we demonstrate that edge detectors can replace learnable depthwise convolution layers to mix features by replacing the N$\times$N kernels with fixed edge detection kernels. And our VGNetF-1.5MP archives 64.4%(-3.2%) top-1 accuracy and 66.2%(-1.4%) top-1 accuracy with additional Gaussian kernels.