 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated and Explainable Denial of Service Analysis for AI-Driven Intrusion Detection Systems
Nov 06, 2025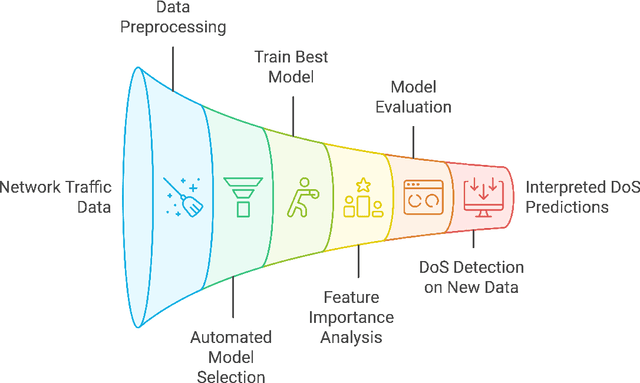
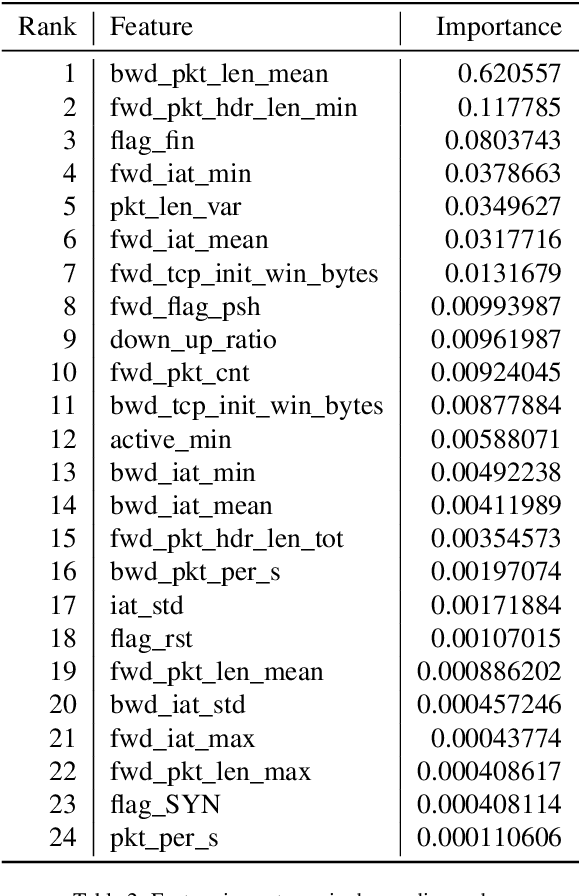
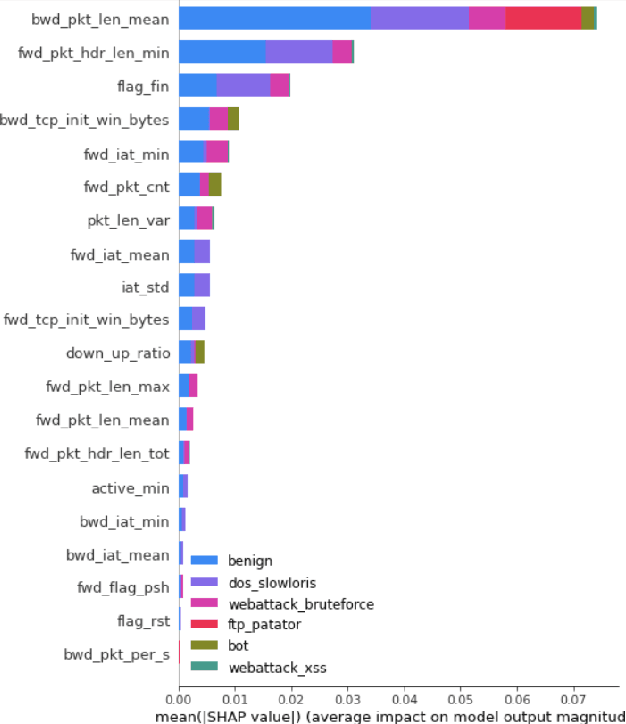
With the increasing frequency and sophistication of Distributed Denial of Service (DDoS) attacks, it has become critical to develop more efficient and interpretable detection methods. Traditional detection systems often struggle with scalability and transparency, hindering real-time response and understanding of attack vectors. This paper presents an automated framework for detecting and interpreting DDoS attacks using machine learning (ML). The proposed method leverages the Tree-based Pipeline Optimization Tool (TPOT) to automate the selection and optimization of ML models and features, reducing the need for manual experimentation. SHapley Additive exPlanations (SHAP) is incorporated to enhance model interpretability, providing detailed insights into the contribution of individual features to the detection process. By combining TPOT's automated pipeline selection with SHAP interpretability, this approach improves the accuracy and transparency of DDoS detection. Experimental results demonstrate that key features such as mean backward packet length and minimum forward packet header length are critical in detecting DDoS attacks, offering a scalable and explainable cybersecurity solution.
Learning in Multiple Spaces: Few-Shot Network Attack Detection with Metric-Fused Prototypical Networks
Dec 28, 2024



Network intrusion detection systems face significant challenges in identifying emerging attack patterns, especially when limited data samples are available. To address this, we propose a novel Multi-Space Prototypical Learning (MSPL) framework tailored for few-shot attack detection. The framework operates across multiple metric spaces-Euclidean, Cosine, Chebyshev, and Wasserstein distances-integrated through a constrained weighting scheme to enhance embedding robustness and improve pattern recognition. By leveraging Polyak-averaged prototype generation, the framework stabilizes the learning process and effectively adapts to rare and zero-day attacks. Additionally, an episodic training paradigm ensures balanced representation across diverse attack classes, enabling robust generalization. Experimental results on benchmark datasets demonstrate that MSPL outperforms traditional approaches in detecting low-profile and novel attack types, establishing it as a robust solution for zero-day attack detection.
Exploring Feature Importance and Explainability Towards Enhanced ML-Based DoS Detection in AI Systems
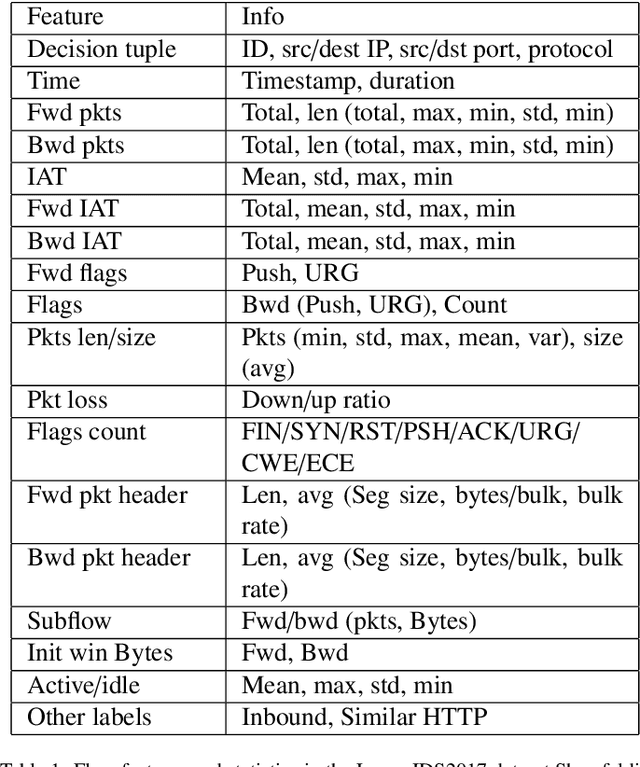
Nov 04, 2024Denial of Service (DoS) attacks pose a significant threat in the realm of AI systems security, causing substantial financial losses and downtime. However, AI systems' high computational demands, dynamic behavior, and data variability make monitoring and detecting DoS attacks challenging. Nowadays, statistical and machine learning (ML)-based DoS classification and detection approaches utilize a broad range of feature selection mechanisms to select a feature subset from networking traffic datasets. Feature selection is critical in enhancing the overall model performance and attack detection accuracy while reducing the training time. In this paper, we investigate the importance of feature selection in improving ML-based detection of DoS attacks. Specifically, we explore feature contribution to the overall components in DoS traffic datasets by utilizing statistical analysis and feature engineering approaches. Our experimental findings demonstrate the usefulness of the thorough statistical analysis of DoS traffic and feature engineering in understanding the behavior of the attack and identifying the best feature selection for ML-based DoS classification and detection.
VRChain: A Blockchain-Enabled Framework for Visual Homing and Navigation Robots
Jun 08, 2022
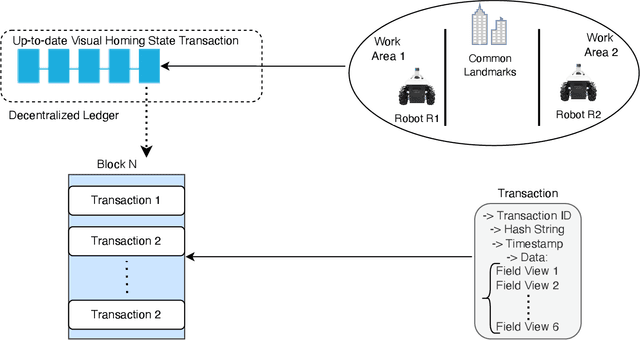
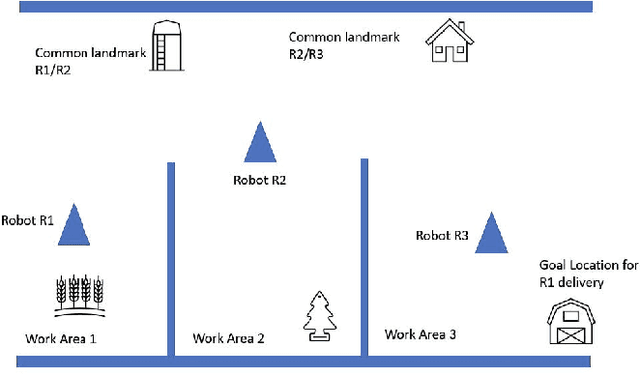

Visual homing is a lightweight approach to robot visual navigation. Based upon stored visual information of a home location, the navigation back to this location can be accomplished from any other location in which this location is visible by comparing home to the current image. However, a key challenge of visual homing is that the target home location must be within the robot's field of view (FOV) to start homing. Therefore, this work addresses such a challenge by integrating blockchain technology into the visual homing navigation system. Based on the decentralized feature of blockchain, the proposed solution enables visual homing robots to share their visual homing information and synchronously access the stored data (visual homing information) in the decentralized ledger to establish the navigation path. The navigation path represents a per-robot sequence of views stored in the ledger. If the home location is not in the FOV, the proposed solution permits a robot to find another robot that can see the home location and travel towards that desired location. The evaluation results demonstrate the efficiency of the proposed framework in terms of end-to-end latency, throughput, and scalability.