 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVRChain: A Blockchain-Enabled Framework for Visual Homing and Navigation Robots
Paper and Code
Jun 08, 2022
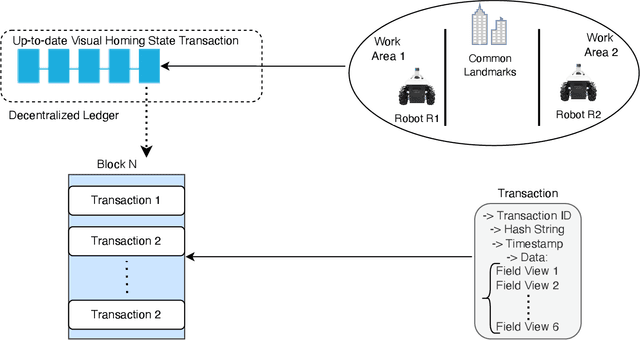
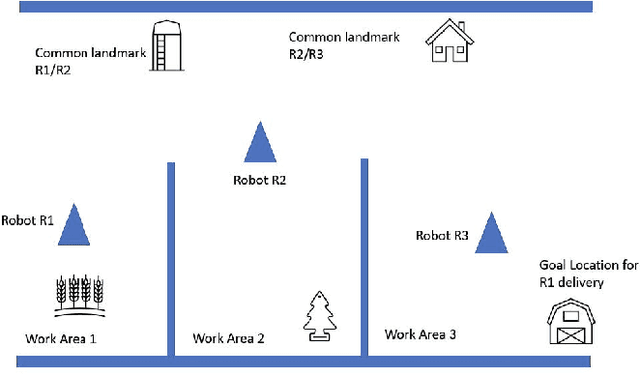

Visual homing is a lightweight approach to robot visual navigation. Based upon stored visual information of a home location, the navigation back to this location can be accomplished from any other location in which this location is visible by comparing home to the current image. However, a key challenge of visual homing is that the target home location must be within the robot's field of view (FOV) to start homing. Therefore, this work addresses such a challenge by integrating blockchain technology into the visual homing navigation system. Based on the decentralized feature of blockchain, the proposed solution enables visual homing robots to share their visual homing information and synchronously access the stored data (visual homing information) in the decentralized ledger to establish the navigation path. The navigation path represents a per-robot sequence of views stored in the ledger. If the home location is not in the FOV, the proposed solution permits a robot to find another robot that can see the home location and travel towards that desired location. The evaluation results demonstrate the efficiency of the proposed framework in terms of end-to-end latency, throughput, and scalability.