 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPRIG: Stackelberg Perception-Reinforcement Learning with Internal Game Dynamics
Feb 20, 2025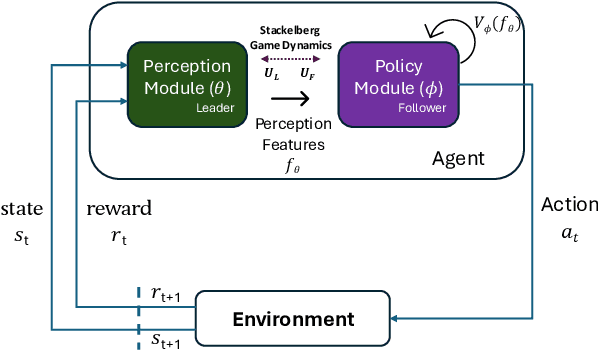
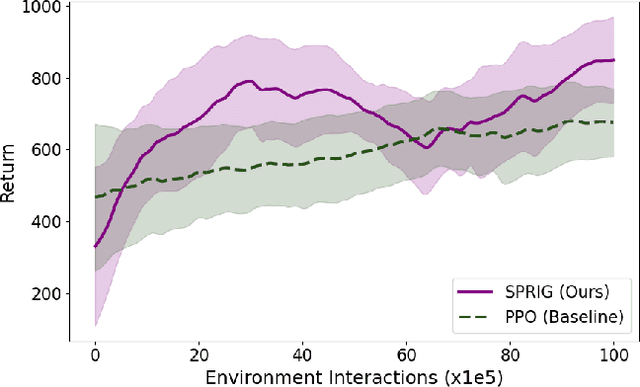
Deep reinforcement learning agents often face challenges to effectively coordinate perception and decision-making components, particularly in environments with high-dimensional sensory inputs where feature relevance varies. This work introduces SPRIG (Stackelberg Perception-Reinforcement learning with Internal Game dynamics), a framework that models the internal perception-policy interaction within a single agent as a cooperative Stackelberg game. In SPRIG, the perception module acts as a leader, strategically processing raw sensory states, while the policy module follows, making decisions based on extracted features. SPRIG provides theoretical guarantees through a modified Bellman operator while preserving the benefits of modern policy optimization. Experimental results on the Atari BeamRider environment demonstrate SPRIG's effectiveness, achieving around 30% higher returns than standard PPO through its game-theoretical balance of feature extraction and decision-making.
Learning in Multiple Spaces: Few-Shot Network Attack Detection with Metric-Fused Prototypical Networks
Dec 28, 2024



Network intrusion detection systems face significant challenges in identifying emerging attack patterns, especially when limited data samples are available. To address this, we propose a novel Multi-Space Prototypical Learning (MSPL) framework tailored for few-shot attack detection. The framework operates across multiple metric spaces-Euclidean, Cosine, Chebyshev, and Wasserstein distances-integrated through a constrained weighting scheme to enhance embedding robustness and improve pattern recognition. By leveraging Polyak-averaged prototype generation, the framework stabilizes the learning process and effectively adapts to rare and zero-day attacks. Additionally, an episodic training paradigm ensures balanced representation across diverse attack classes, enabling robust generalization. Experimental results on benchmark datasets demonstrate that MSPL outperforms traditional approaches in detecting low-profile and novel attack types, establishing it as a robust solution for zero-day attack detection.