 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstration of real-time event camera to collaborative robot communication
Jul 16, 2024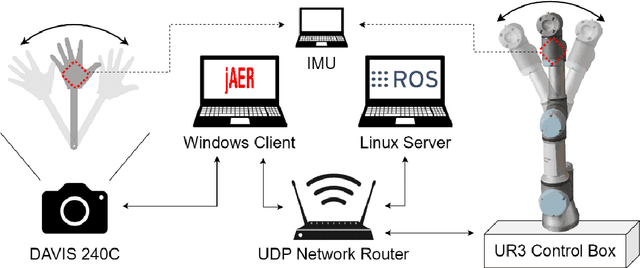
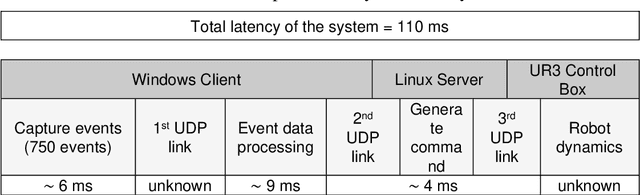
Real-time robot actuation is one of the main challenges to overcome in human-robot interaction. Most visual sensors are either too slow or their data are too complex to provide meaningful information and low latency input to a robotic system. Data output of an event camera is high-frequency and extremely lightweight, with only 8 bytes per event. To evaluate the hypothesis of using event cameras as data source for a real-time robotic system, the position of a waving hand is acquired from the event data and transmitted to a collaborative robot as a movement command. A total time delay of 110 ms was measured between the original movement and the robot movement, where much of the delay is caused by the robot dynamics.
Event-based dataset for the detection and classification of manufacturing assembly tasks
May 23, 2024The featured dataset, the Event-based Dataset of Assembly Tasks (EDAT24), showcases a selection of manufacturing primitive tasks (idle, pick, place, and screw), which are basic actions performed by human operators in any manufacturing assembly. The data were captured using a DAVIS240C event camera, an asynchronous vision sensor that registers events when changes in light intensity value occur. Events are a lightweight data format for conveying visual information and are well-suited for real-time detection and analysis of human motion. Each manufacturing primitive has 100 recorded samples of DAVIS240C data, including events and greyscale frames, for a total of 400 samples. In the dataset, the user interacts with objects from the open-source CT-Benchmark in front of the static DAVIS event camera. All data are made available in raw form (.aedat) and in pre-processed form (.npy). Custom-built Python code is made available together with the dataset to aid researchers to add new manufacturing primitives or extend the dataset with more samples.
A Collaborative Robot-Assisted Manufacturing Assembly Process
Mar 08, 2024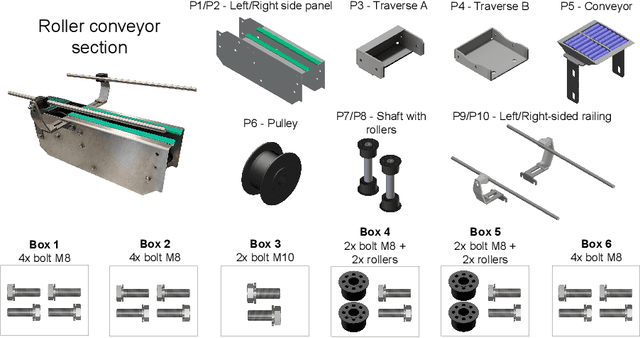
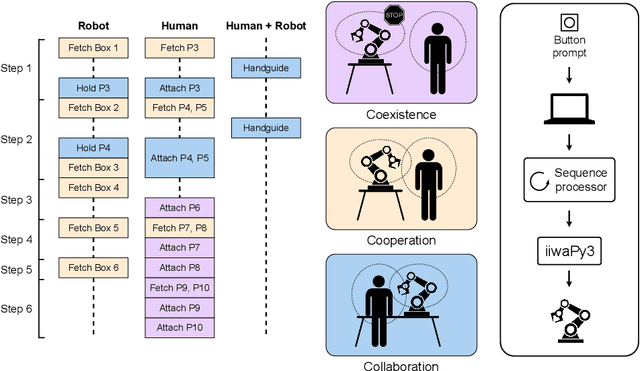
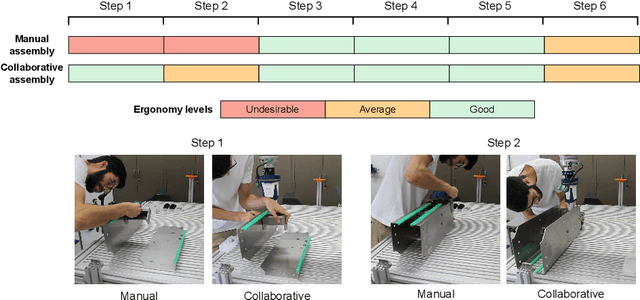
An effective human-robot collaborative process results in the reduction of the operator's workload, promoting a more efficient, productive, safer and less error-prone working environment. However, the implementation of collaborative robots in industry is still challenging. In this work, we compare manual and robot-assisted assembly processes to evaluate the effectiveness of collaborative robots while featuring different modes of operation (coexistence, cooperation and collaboration). Results indicate an improvement in ergonomic conditions and ease of execution without substantially compromising assembly time. Furthermore, the robot is intuitive to use and guides the user on the proper sequencing of the process.
Benchmarking human-robot collaborative assembly tasks
Feb 01, 2024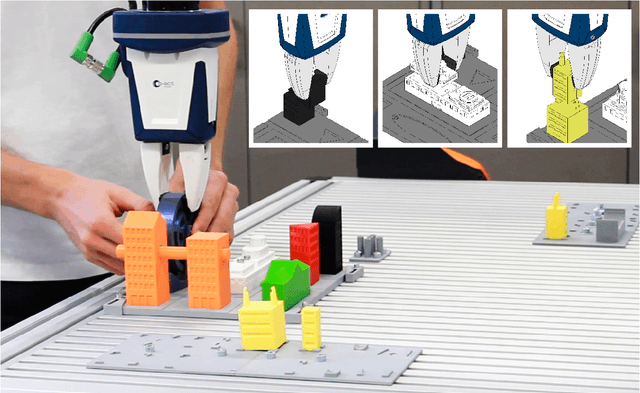
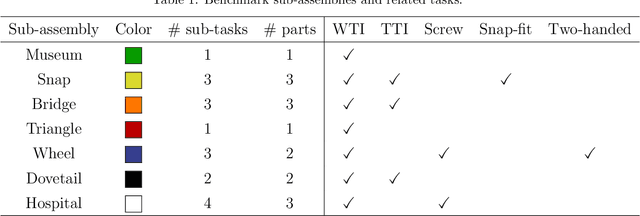
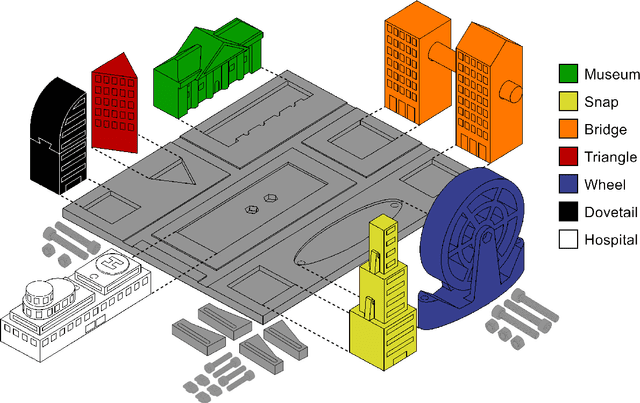
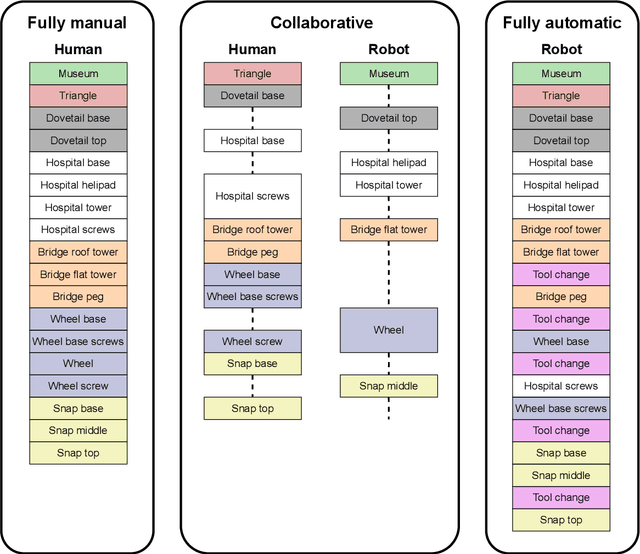
Manufacturing assembly tasks can vary in complexity and level of automation. Yet, achieving full automation can be challenging and inefficient, particularly due to the complexity of certain assembly operations. Human-robot collaborative work, leveraging the strengths of human labor alongside the capabilities of robots, can be a solution for enhancing efficiency. This paper introduces the CT benchmark, a benchmark and model set designed to facilitate the testing and evaluation of human-robot collaborative assembly scenarios. It was designed to compare manual and automatic processes using metrics such as the assembly time and human workload. The components of the model set can be assembled through the most common assembly tasks, each with varying levels of difficulty. The CT benchmark was designed with a focus on its applicability in human-robot collaborative environments, with the aim of ensuring the reproducibility and replicability of experiments. Experiments were carried out to assess assembly performance in three different setups (manual, automatic and collaborative), measuring metrics related to the assembly time and the workload on human operators. The results suggest that the collaborative approach takes longer than the fully manual assembly, with an increase of 70.8%. However, users reported a lower overall workload, as well as reduced mental demand, physical demand, and effort according to the NASA-TLX questionnaire.
Event-based tracking of human hands
Apr 13, 2023



This paper proposes a novel method for human hands tracking using data from an event camera. The event camera detects changes in brightness, measuring motion, with low latency, no motion blur, low power consumption and high dynamic range. Captured frames are analysed using lightweight algorithms reporting 3D hand position data. The chosen pick-and-place scenario serves as an example input for collaborative human-robot interactions and in obstacle avoidance for human-robot safety applications. Events data are pre-processed into intensity frames. The regions of interest (ROI) are defined through object edge event activity, reducing noise. ROI features are extracted for use in-depth perception. Event-based tracking of human hand demonstrated feasible, in real time and at a low computational cost. The proposed ROI-finding method reduces noise from intensity images, achieving up to 89% of data reduction in relation to the original, while preserving the features. The depth estimation error in relation to ground truth (measured with wearables), measured using dynamic time warping and using a single event camera, is from 15 to 30 millimetres, depending on the plane it is measured. Tracking of human hands in 3D space using a single event camera data and lightweight algorithms to define ROI features (hands tracking in space).
Classification of Primitive Manufacturing Tasks from Filtered Event Data
Mar 15, 2023Collaborative robots are increasingly present in industry to support human activities. However, to make the human-robot collaborative process more effective, there are several challenges to be addressed. Collaborative robotic systems need to be aware of the human activities to (1) anticipate collaborative/assistive actions, (2) learn by demonstration, and (3) activate safety procedures in shared workspace. This study proposes an action classification system to recognize primitive assembly tasks from human motion events data captured by a Dynamic and Active-pixel Vision Sensor (DAVIS). Several filters are compared and combined to remove event data noise. Task patterns are classified from a continuous stream of event data using advanced deep learning and recurrent networks to classify spatial and temporal features. Experiments were conducted on a novel dataset, the dataset of manufacturing tasks (DMT22), featuring 5 classes of representative manufacturing primitives (PickUp, Place, Screw, Hold, Idle) from 5 participants. Results show that the proposed filters remove about 65\% of all events (noise) per recording, conducting to a classification accuracy up to 99,37\% for subjects that trained the system and 97.08\% for new subjects. Data from a left-handed subject were successfully classified using only right-handed training data. These results are object independent.