Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Collaborative Robot-Assisted Manufacturing Assembly Process
Paper and Code
Mar 08, 2024
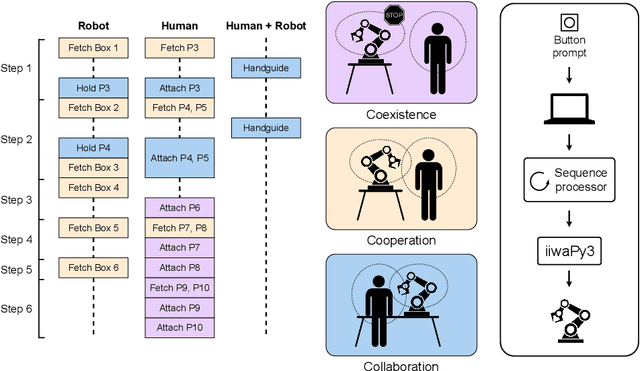
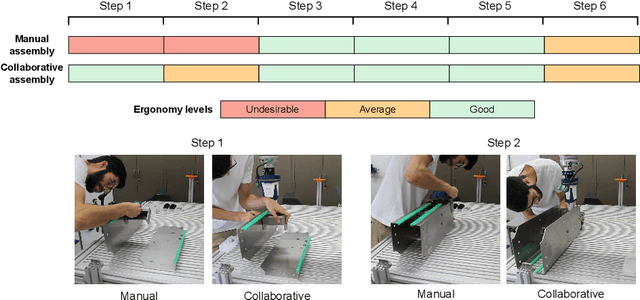
An effective human-robot collaborative process results in the reduction of the operator's workload, promoting a more efficient, productive, safer and less error-prone working environment. However, the implementation of collaborative robots in industry is still challenging. In this work, we compare manual and robot-assisted assembly processes to evaluate the effectiveness of collaborative robots while featuring different modes of operation (coexistence, cooperation and collaboration). Results indicate an improvement in ergonomic conditions and ease of execution without substantially compromising assembly time. Furthermore, the robot is intuitive to use and guides the user on the proper sequencing of the process.
* Sixth Iberian Robotics Conference, Robot 2023
View paper on