Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstration of real-time event camera to collaborative robot communication
Paper and Code
Jul 16, 2024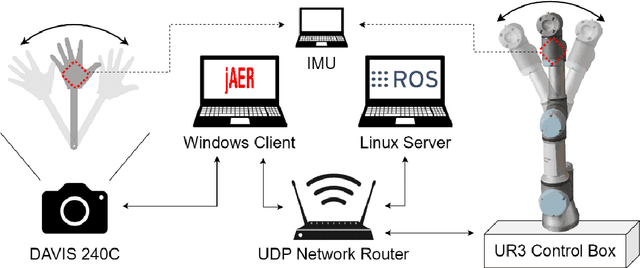
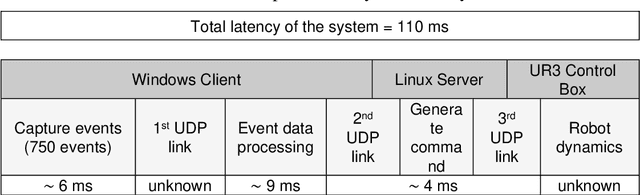
Real-time robot actuation is one of the main challenges to overcome in human-robot interaction. Most visual sensors are either too slow or their data are too complex to provide meaningful information and low latency input to a robotic system. Data output of an event camera is high-frequency and extremely lightweight, with only 8 bytes per event. To evaluate the hypothesis of using event cameras as data source for a real-time robotic system, the position of a waving hand is acquired from the event data and transmitted to a collaborative robot as a movement command. A total time delay of 110 ms was measured between the original movement and the robot movement, where much of the delay is caused by the robot dynamics.
* The 5th IFToMM ITALY Conference, IFIT 2024
View paper on