 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeamSec: A Practical mmWave Physical Layer Security Scheme Against Strong Adversaries
Sep 19, 2023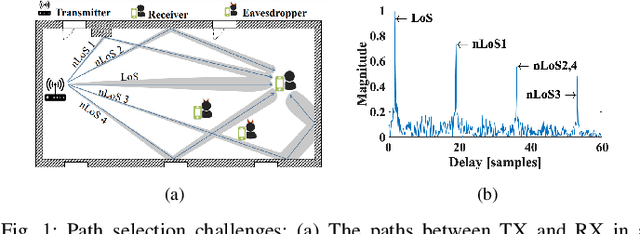
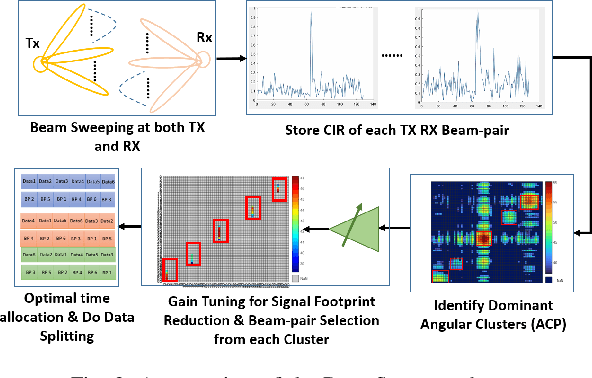
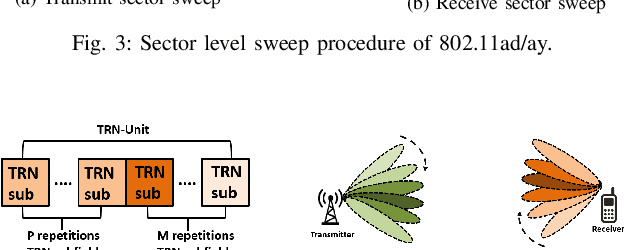
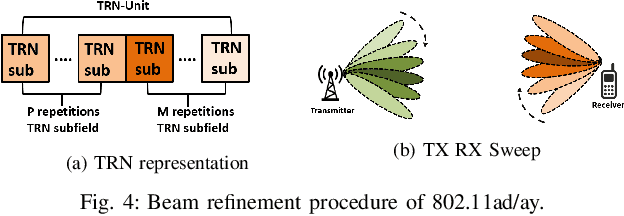
The high directionality of millimeter-wave (mmWave) communication systems has proven effective in reducing the attack surface against eavesdropping, thus improving the physical layer security. However, even with highly directional beams, the system is still exposed to eavesdropping against adversaries located within the main lobe. In this paper, we propose \acrshort{BSec}, a solution to protect the users even from adversaries located in the main lobe. The key feature of BeamSec are: (i) Operating without the knowledge of eavesdropper's location/channel; (ii) Robustness against colluding eavesdropping attack and (iii) Standard compatibility, which we prove using experiments via our IEEE 802.11ad/ay-compatible 60 GHz phased-array testbed. Methodologically, BeamSec first identifies uncorrelated and diverse beam-pairs between the transmitter and receiver by analyzing signal characteristics available through standard-compliant procedures. Next, it encodes the information jointly over all selected beam-pairs to minimize information leakage. We study two methods for allocating transmission time among different beams, namely uniform allocation (no knowledge of the wireless channel) and optimal allocation for maximization of the secrecy rate (with partial knowledge of the wireless channel). Our experiments show that \acrshort{BSec} outperforms the benchmark schemes against single and colluding eavesdroppers and enhances the secrecy rate by 79.8% over a random paths selection benchmark.
Joint Sensing, Communication and Localization of a Silent Abnormality Using Molecular Diffusion
Mar 30, 2022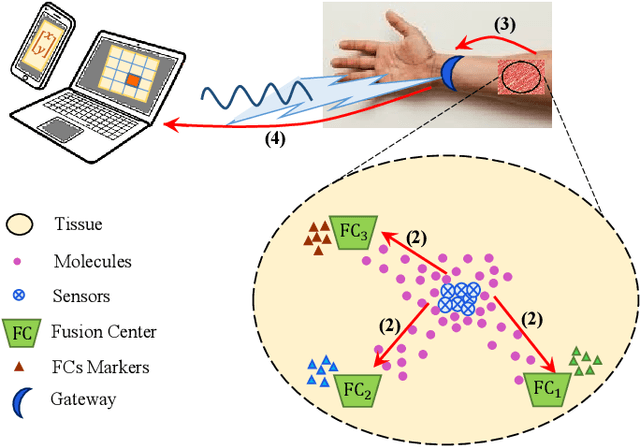

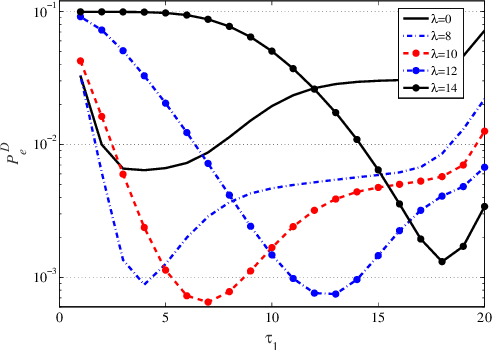
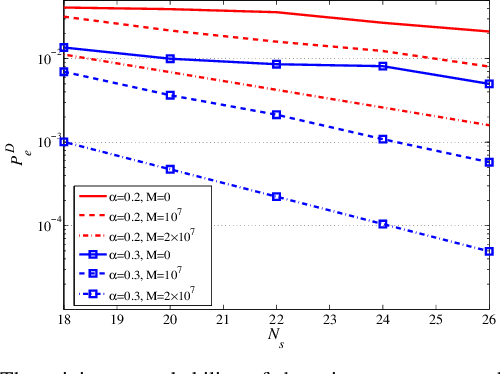
In this paper, we propose a molecular communication system to localize an abnormality in a diffusion based medium. We consider a general setup to perform joint sensing, communication and localization. This setup consists of three types of devices, each for a different task: mobile sensors for navigation and molecule releasing (for communication), fusion centers (FC)s for sampling, amplifying and forwarding the signal, and a gateway for making decision or exchanging the information with an external device. The sensors move randomly in the environment to reach the abnormality. We consider both collaborative and non-collaborative sensors that simultaneously release their molecules to the FCs when the number of activated sensors or the moving time reach a certain threshold, respectively. The FCs amplify the received signal and forward it to the gateway for decision making using either an ideal or a noisy communication channel. A practical application of the proposed model is drug delivery in a tissue of human body, in order to guide the nanomachine bound drug to the exact location. The decision rules and probabilities of error are obtained for two considered sensors types in both ideal and noisy communication channels.
Theoretical Concept Study of Cooperative Abnormality Detection and Localization in Fluidic-Medium Molecular Communication
May 16, 2021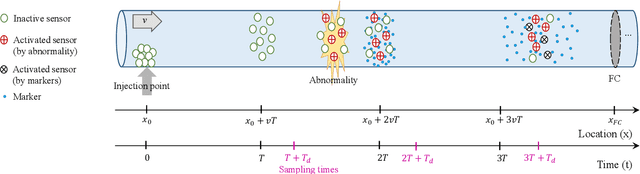

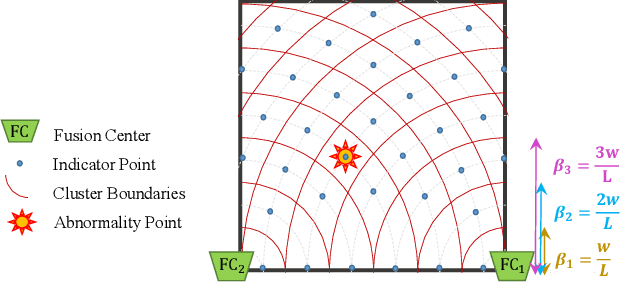
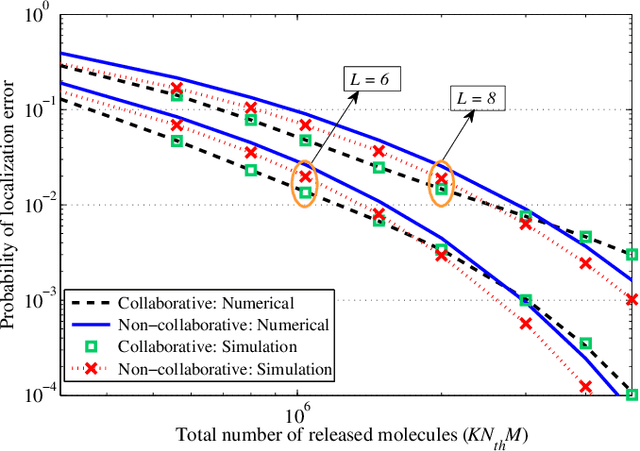
In this paper, we propose a theoretical framework for cooperative abnormality detection and localization systems by exploiting molecular communication setup. The system consists of mobile sensors in a fluidic medium, which are injected into the medium to search the environment for abnormality. Some fusion centers (FC) are placed at specific locations in the medium, which absorb all sensors arrived at their locations, and by observing its state, each FC decides on the abnormality existence and/or its location. To reduce the effects of sensor imperfection, we propose a scheme where the sensors release some molecules (i.e., markers) into the medium after they sense an abnormality. If the goal is abnormality detection, the released molecules are used to cooperatively activate other sensors. If the goal is abnormality localization, the released molecules are used by the FCs to determine the location. In our model, both sensors' imperfection and markers background noise are taken into account. For the detection phase, we consider two sensor types based on their activation strategy by markers. To make the analysis tractable, we assume some ideal assumptions for the sensors' model. We investigate the related binary hypothesis testing problem and obtain the probabilities of false alarm and miss-detection. It is shown that using sensors with the ability of cooperatively activating each other can significantly improve the detection performance in terms of probability of error. For the localization phase, we consider two types of FCs based on their capability in reading sensors' storage levels. We study their performance and obtain the optimal and sub-optimal decision schemes and also the probability of localization error for both perfect and imperfect sensing regimes.