 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian and Convolutional Networks for Hierarchical Morphological Classification of Galaxies
May 03, 2024This work is focused on the morphological classification of galaxies following the Hubble sequence in which the different classes are arranged in a hierarchy. The proposed method, BCNN, is composed of two main modules. First, a convolutional neural network (CNN) is trained with images of the different classes of galaxies (image augmentation is carried out to balance some classes); the CNN outputs the probability for each class of the hierarchy, and its outputs/predictions feed the second module. The second module consists of a Bayesian network that represents the hierarchy and helps to improve the prediction accuracy by combining the predictions of the first phase while maintaining the hierarchical constraint (in a hierarchy, an instance associated with a node must be associated to all its ancestors), through probabilistic inference over the Bayesian network so that a consistent prediction is obtained. Different images from the Hubble telescope have been collected and labeled by experts, which are used to perform the experiments. The results show that BCNN performed better than several CNNs in multiple evaluation measures, reaching the next scores: 67% in exact match, 78% in accuracy, and 83% in hierarchical F-measure.
Semi-Supervised Hierarchical Multi-Label Classifier Based on Local Information
Apr 30, 2024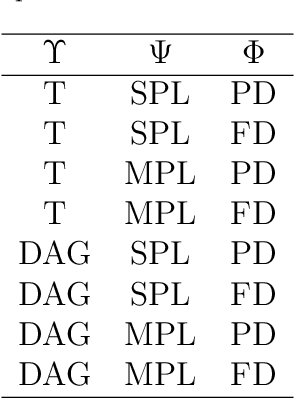
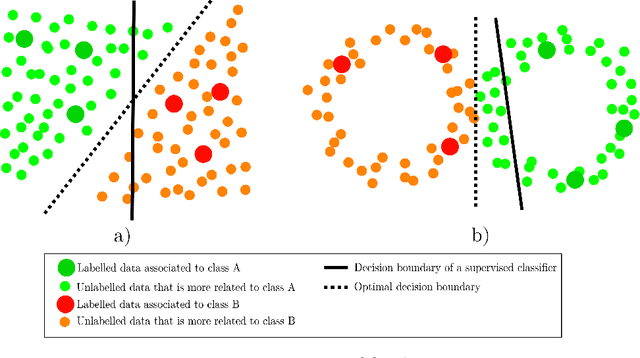
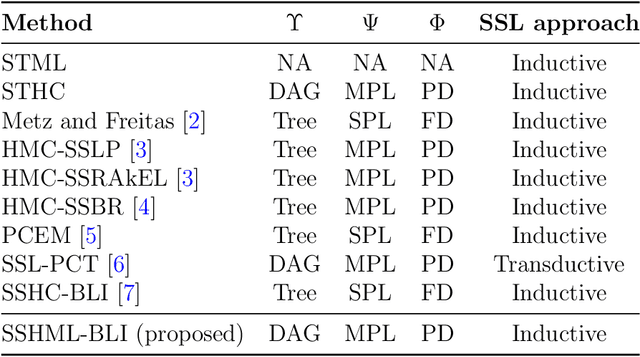
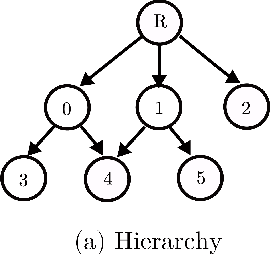
Scarcity of labeled data is a common problem in supervised classification, since hand-labeling can be time consuming, expensive or hard to label; on the other hand, large amounts of unlabeled information can be found. The problem of scarcity of labeled data is even more notorious in hierarchical classification, because the data of a node is split among its children, which results in few instances associated to the deepest nodes of the hierarchy. In this work it is proposed the semi-supervised hierarchical multi-label classifier based on local information (SSHMC-BLI) which can be trained with labeled and unlabeled data to perform hierarchical classification tasks. The method can be applied to any type of hierarchical problem, here we focus on the most difficult case: hierarchies of DAG type, where the instances can be associated to multiple paths of labels which can finish in an internal node. SSHMC-BLI builds pseudo-labels for each unlabeled instance from the paths of labels of its labeled neighbors, while it considers whether the unlabeled instance is similar to its neighbors. Experiments on 12 challenging datasets from functional genomics show that making use of unlabeled along with labeled data can help to improve the performance of a supervised hierarchical classifier trained only on labeled data, even with statistical significance.
Knowledge Transfer for Cross-Domain Reinforcement Learning: A Systematic Review
Apr 26, 2024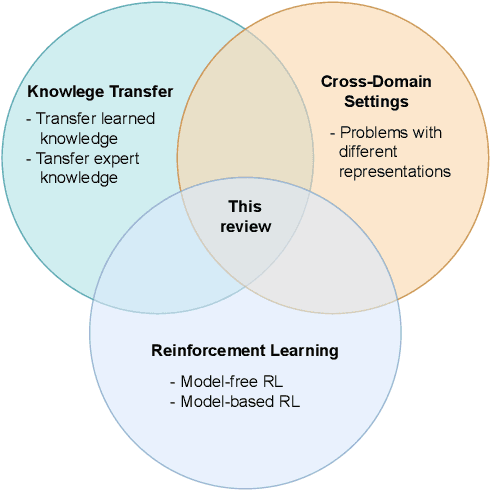
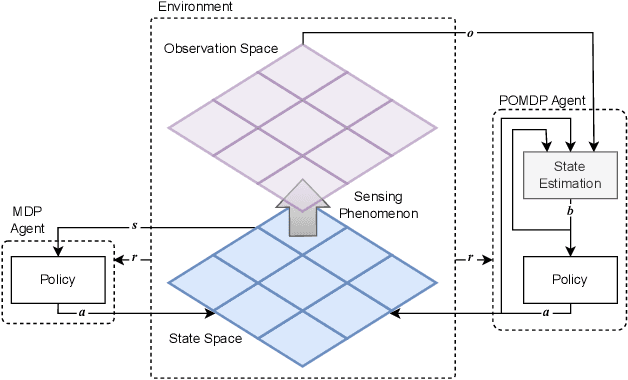
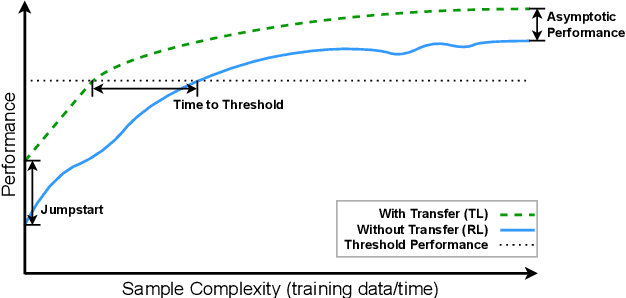
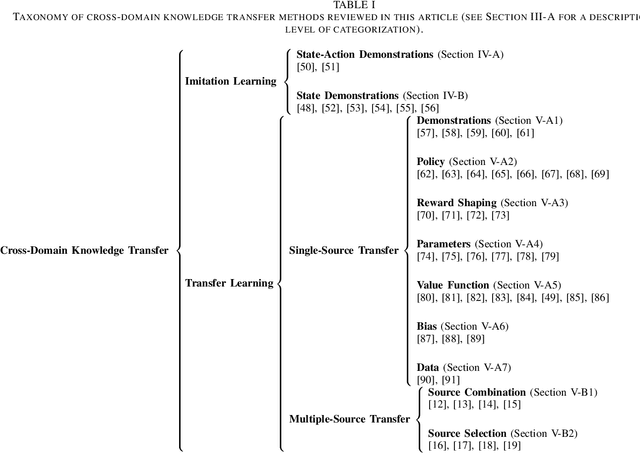
Reinforcement Learning (RL) provides a framework in which agents can be trained, via trial and error, to solve complex decision-making problems. Learning with little supervision causes RL methods to require large amounts of data, which renders them too expensive for many applications (e.g. robotics). By reusing knowledge from a different task, knowledge transfer methods present an alternative to reduce the training time in RL. Given how severe data scarcity can be, there has been a growing interest for methods capable of transferring knowledge across different domains (i.e. problems with different representation) due to the flexibility they offer. This review presents a unifying analysis of methods focused on transferring knowledge across different domains. Through a taxonomy based on a transfer-approach categorization, and a characterization of works based on their data-assumption requirements, the objectives of this article are to 1) provide a comprehensive and systematic revision of knowledge transfer methods for the cross-domain RL setting, 2) categorize and characterize these methods to provide an analysis based on relevant features such as their transfer approach and data requirements, and 3) discuss the main challenges regarding cross-domain knowledge transfer, as well as ideas of future directions worth exploring to address these problems.
Similarity-based Knowledge Transfer for Cross-Domain Reinforcement Learning
Dec 05, 2023Transferring knowledge in cross-domain reinforcement learning is a challenging setting in which learning is accelerated by reusing knowledge from a task with different observation and/or action space. However, it is often necessary to carefully select the source of knowledge for the receiving end to benefit from the transfer process. In this article, we study how to measure the similarity between cross-domain reinforcement learning tasks to select a source of knowledge that will improve the performance of the learning agent. We developed a semi-supervised alignment loss to match different spaces with a set of encoder-decoders, and use them to measure similarity and transfer policies across tasks. In comparison to prior works, our method does not require data to be aligned, paired or collected by expert policies. Experimental results, on a set of varied Mujoco control tasks, show the robustness of our method in effectively selecting and transferring knowledge, without the supervision of a tailored set of source tasks.
Knowledge-Based Hierarchical POMDPs for Task Planning
Apr 09, 2021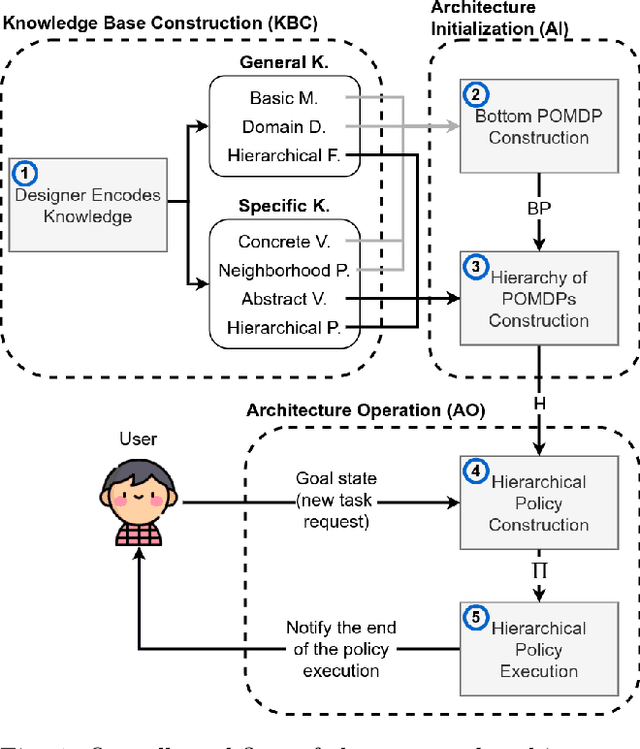
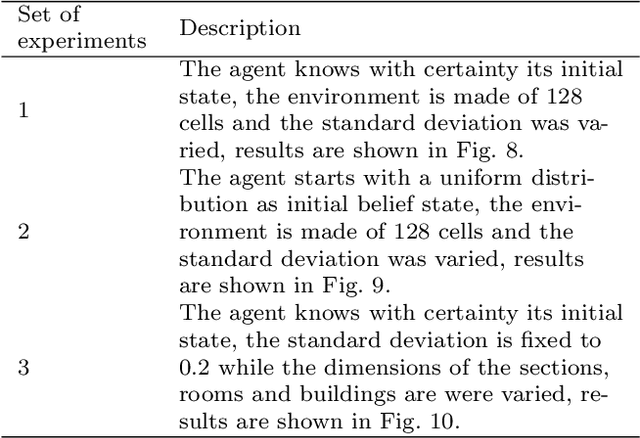
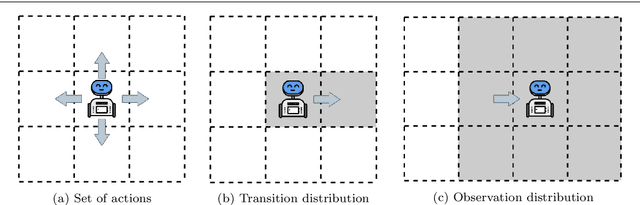
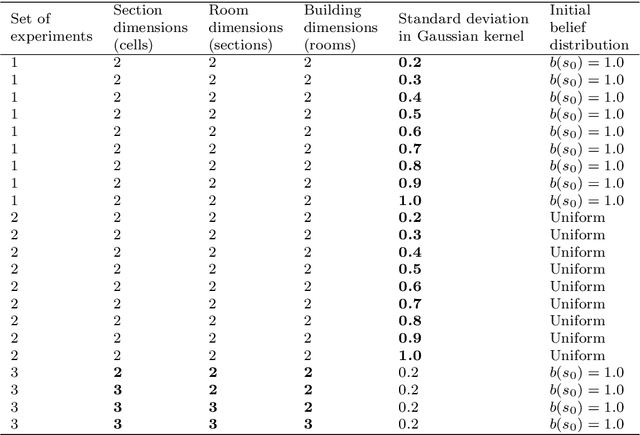
The main goal in task planning is to build a sequence of actions that takes an agent from an initial state to a goal state. In robotics, this is particularly difficult because actions usually have several possible results, and sensors are prone to produce measurements with error. Partially observable Markov decision processes (POMDPs) are commonly employed, thanks to their capacity to model the uncertainty of actions that modify and monitor the state of a system. However, since solving a POMDP is computationally expensive, their usage becomes prohibitive for most robotic applications. In this paper, we propose a task planning architecture for service robotics. In the context of service robot design, we present a scheme to encode knowledge about the robot and its environment, that promotes the modularity and reuse of information. Also, we introduce a new recursive definition of a POMDP that enables our architecture to autonomously build a hierarchy of POMDPs, so that it can be used to generate and execute plans that solve the task at hand. Experimental results show that, in comparison to baseline methods, by following a recursive hierarchical approach the architecture is able to significantly reduce the planning time, while maintaining (or even improving) the robustness under several scenarios that vary in uncertainty and size.
Causal Structure Learning: a Bayesian approach based on random graphs
Oct 13, 2020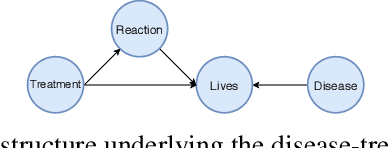

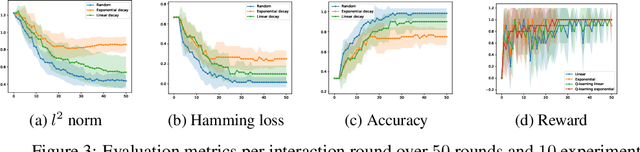
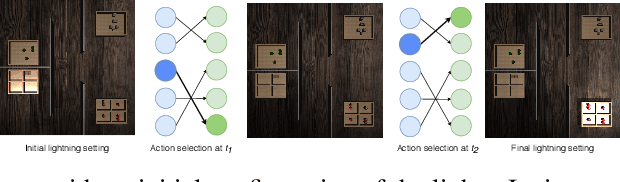
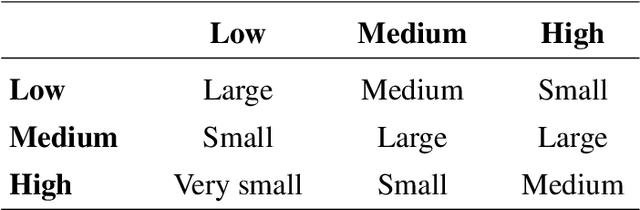
A Random Graph is a random object which take its values in the space of graphs. We take advantage of the expressibility of graphs in order to model the uncertainty about the existence of causal relationships within a given set of variables. We adopt a Bayesian point of view in order to capture a causal structure via interaction and learning with a causal environment. We test our method over two different scenarios, and the experiments mainly confirm that our technique can learn a causal structure. Furthermore, the experiments and results presented for the first test scenario demonstrate the usefulness of our method to learn a causal structure as well as the optimal action. On the other hand the second experiment, shows that our proposal manages to learn the underlying causal structure of several tasks with different sizes and different causal structures.
Competence-Based Student Modelling with Dynamic Bayesian Networks
Aug 21, 2020
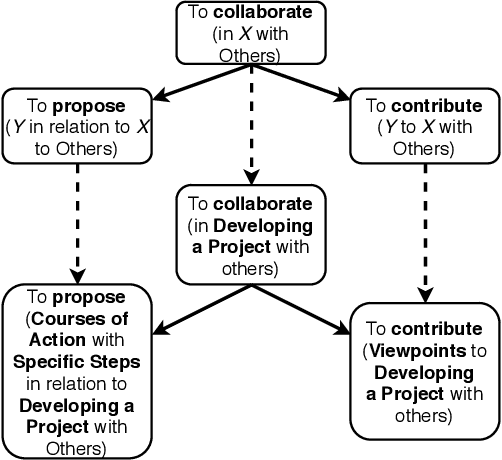
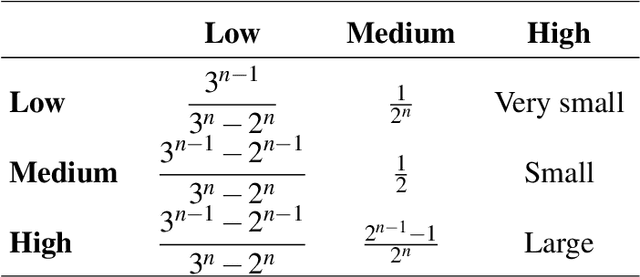
We present a general method for using a competences map, created by defining generalization/specialization and inclusion/part-of relationships between competences, in order to build an overlay student model in the form of a dynamic Bayesian network in which conditional probability distributions are defined per relationship type. We have created a competences map for a subset of the transversal competences defined as educational goals for the Mexican high school system, then we have built a dynamic Bayesian student model as said before, and we have use it to trace the development of the corresponding competences by some hypothetical students exhibiting representative performances along an online course (low to medium performance, medium to high performance but with low final score, and two terms medium to high performance). The results obtained suggest that the proposed way for constructing dynamic Bayesian student models on the basis of competences maps could be useful to monitor competence development by real students in online course.