 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple-level Point Embedding for Solving Human Trajectory Imputation with Prediction
Jan 12, 2023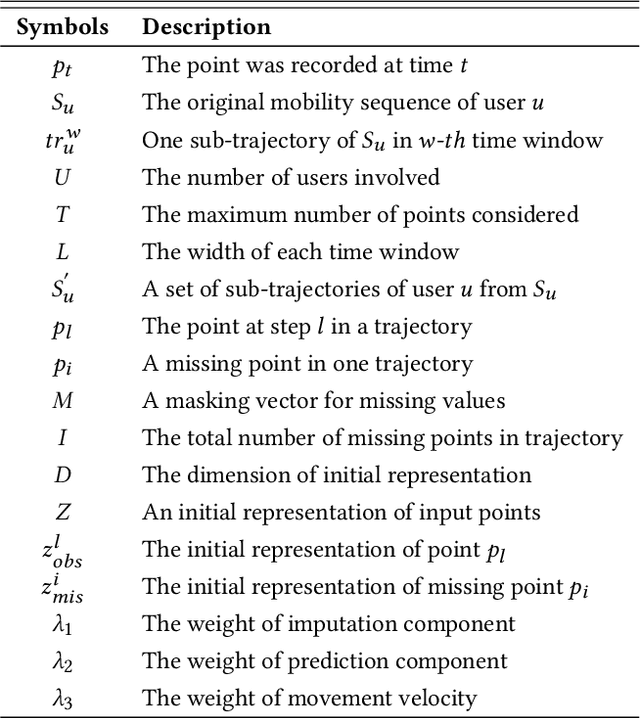
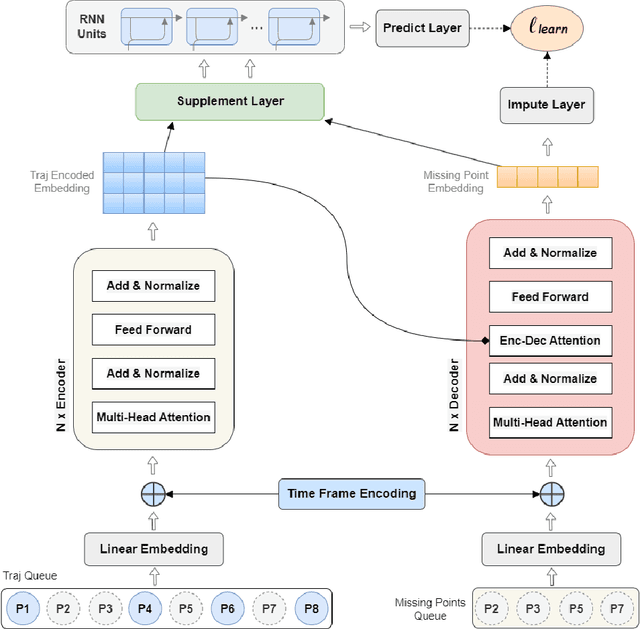
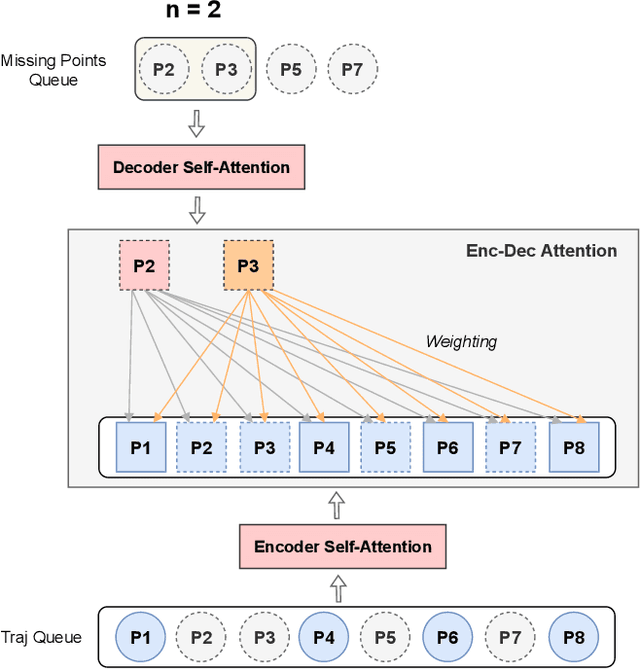

Sparsity is a common issue in many trajectory datasets, including human mobility data. This issue frequently brings more difficulty to relevant learning tasks, such as trajectory imputation and prediction. Nowadays, little existing work simultaneously deals with imputation and prediction on human trajectories. This work plans to explore whether the learning process of imputation and prediction could benefit from each other to achieve better outcomes. And the question will be answered by studying the coexistence patterns between missing points and observed ones in incomplete trajectories. More specifically, the proposed model develops an imputation component based on the self-attention mechanism to capture the coexistence patterns between observations and missing points among encoder-decoder layers. Meanwhile, a recurrent unit is integrated to extract the sequential embeddings from newly imputed sequences for predicting the following location. Furthermore, a new implementation called Imputation Cycle is introduced to enable gradual imputation with prediction enhancement at multiple levels, which helps to accelerate the speed of convergence. The experimental results on three different real-world mobility datasets show that the proposed approach has significant advantages over the competitive baselines across both imputation and prediction tasks in terms of accuracy and stability.
Multi-officer Routing for Patrolling High Risk Areas Jointly Learned from Check-ins, Crime and Incident Response Data
Jul 31, 2020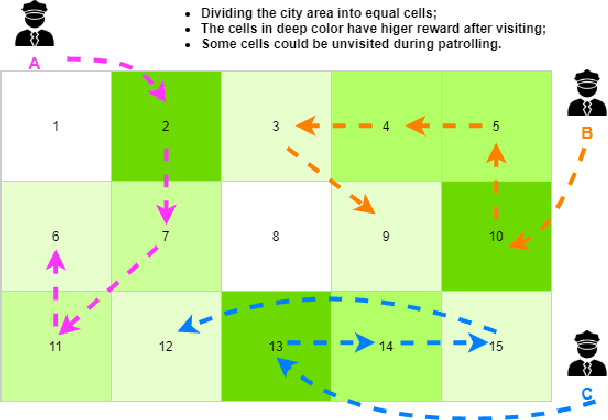
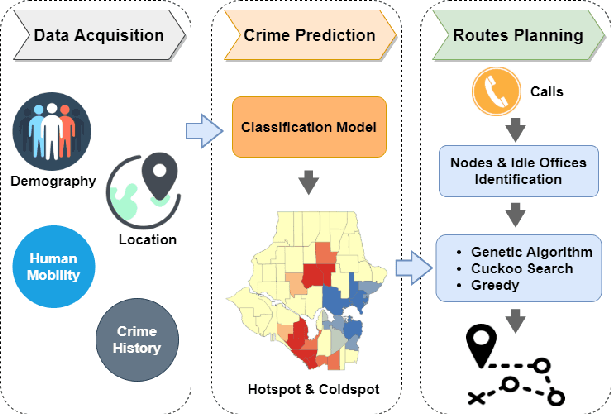
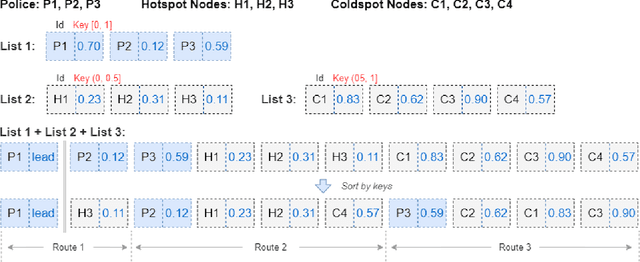
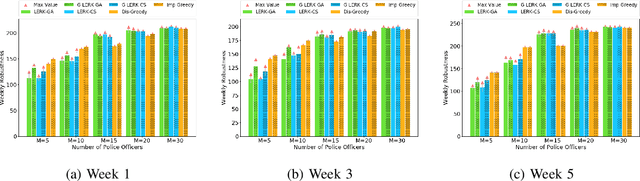
A well-crafted police patrol route design is vital in providing community safety and security in the society. Previous works have largely focused on predicting crime events with historical crime data. The usage of large-scale mobility data collected from Location-Based Social Network, or check-ins, and Point of Interests (POI) data for designing an effective police patrol is largely understudied. Given that there are multiple police officers being on duty in a real-life situation, this makes the problem more complex to solve. In this paper, we formulate the dynamic crime patrol planning problem for multiple police officers using check-ins, crime, incident response data, and POI information. We propose a joint learning and non-random optimisation method for the representation of possible solutions where multiple police officers patrol the high crime risk areas simultaneously first rather than the low crime risk areas. Later, meta-heuristic Genetic Algorithm (GA) and Cuckoo Search (CS) are implemented to find the optimal routes. The performance of the proposed solution is verified and compared with several state-of-art methods using real-world datasets.
G-CREWE: Graph CompREssion With Embedding for Network Alignment
Jul 30, 2020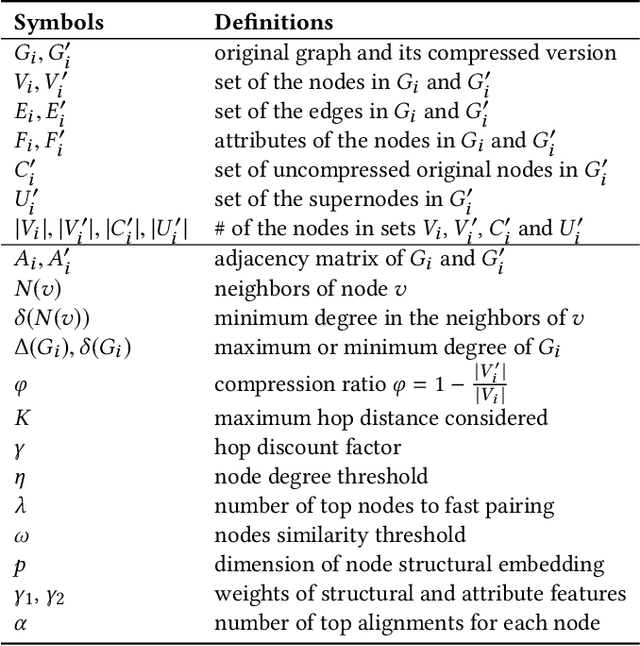
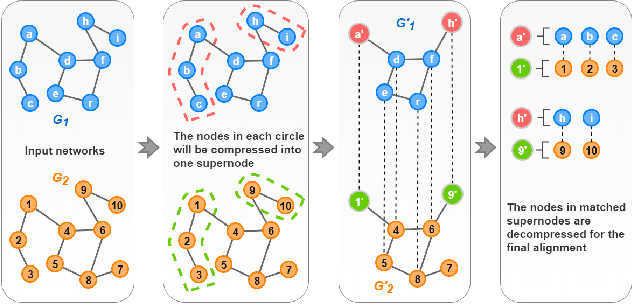
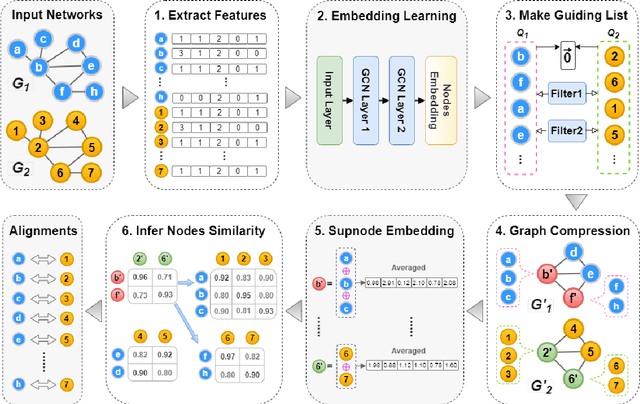
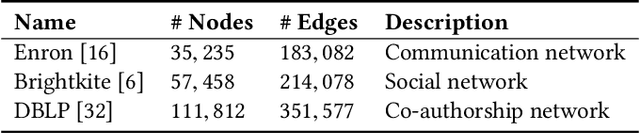
Network alignment is useful for multiple applications that require increasingly large graphs to be processed. Existing research approaches this as an optimization problem or computes the similarity based on node representations. However, the process of aligning every pair of nodes between relatively large networks is time-consuming and resource-intensive. In this paper, we propose a framework, called G-CREWE (Graph CompREssion With Embedding) to solve the network alignment problem. G-CREWE uses node embeddings to align the networks on two levels of resolution, a fine resolution given by the original network and a coarse resolution given by a compressed version, to achieve an efficient and effective network alignment. The framework first extracts node features and learns the node embedding via a Graph Convolutional Network (GCN). Then, node embedding helps to guide the process of graph compression and finally improve the alignment performance. As part of G-CREWE, we also propose a new compression mechanism called MERGE (Minimum dEgRee neiGhbors comprEssion) to reduce the size of the input networks while preserving the consistency in their topological structure. Experiments on all real networks show that our method is more than twice as fast as the most competitive existing methods while maintaining high accuracy.