 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Blocking Collisions between People, Objects and other Robots
Mar 05, 2018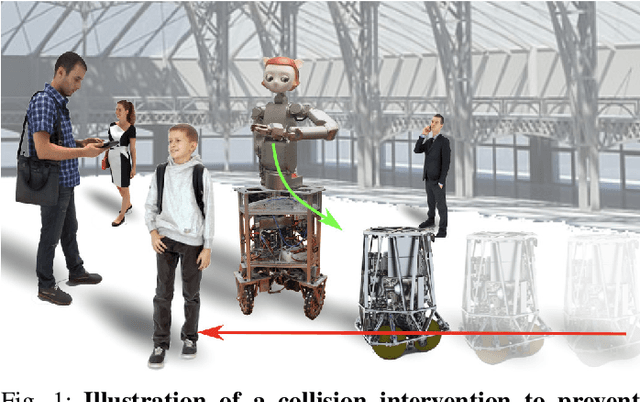
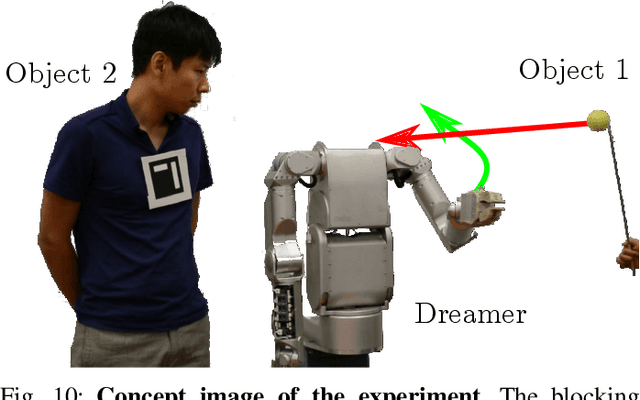
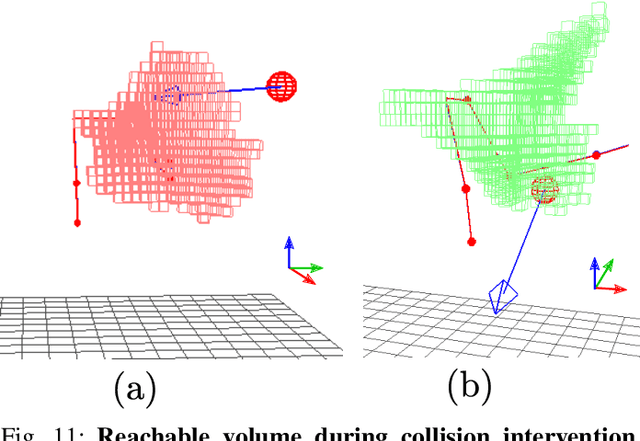
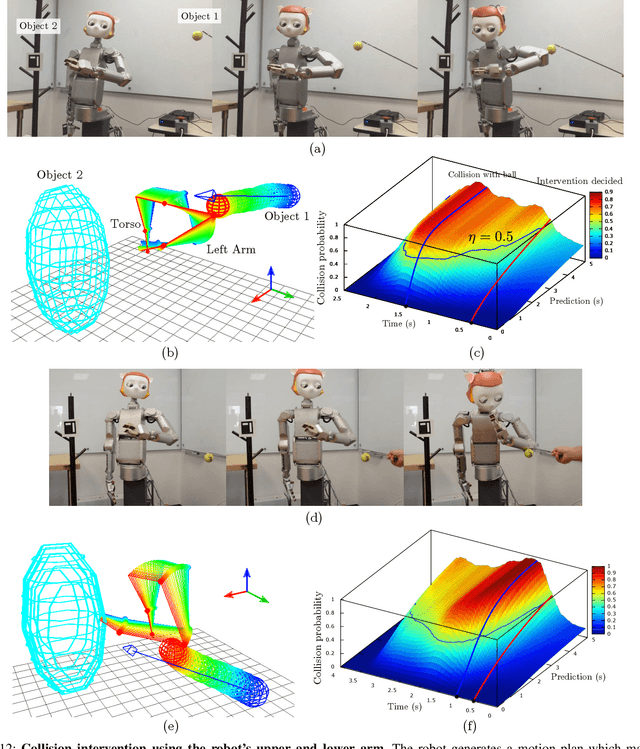
Intentional or unintentional contacts are bound to occur increasingly more often due to the deployment of autonomous systems in human environments. In this paper, we devise methods to computationally predict imminent collisions between objects, robots and people, and use an upper-body humanoid robot to block them if they are likely to happen. We employ statistical methods for effective collision prediction followed by sensor-based trajectory generation and real-time control to attempt to stop the likely collisions using the most favorable part of the blocking robot. We thoroughly investigate collisions in various types of experimental setups involving objects, robots, and people. Overall, the main contribution of this paper is to devise sensor-based prediction, trajectory generation and control processes for highly articulated robots to prevent collisions against people, and conduct numerous experiments to validate this approach.
Intelligent Collision Management in Dynamic Environments for Human-Centered Robots
Nov 07, 2017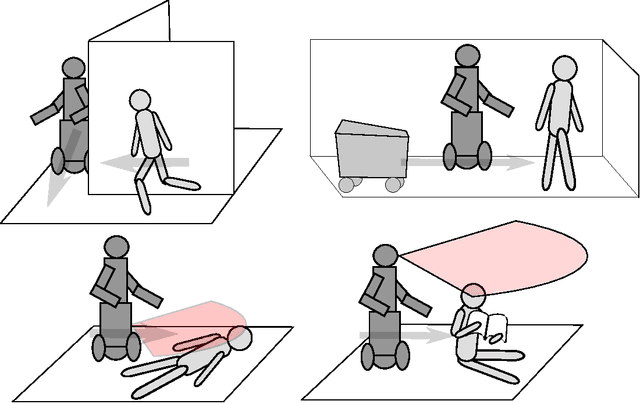
In this context, a major focus of this thesis is on unintentional collisions, where a straight goal is to eliminate injury from users and passerby's via realtime sensing and control systems. A less obvious focus is to combine collision response with tools from motion planning in order to produce intelligent safety behaviors that ensure the safety of multiple people or objects. Yet, an even more challenging problem is to anticipate future collisions between objects external to the robot and have the robot intervene to prevent imminent accidents. In this dissertation, we study all of these sophisticated flavors of collision reaction and intervention. We investigate in-depth multiple key and interesting topics related to collisions and safety of mobile robots and robotic manipulators operating in human environments. Overall we deeply investigate collisions from many perspectives and develop techniques that borrow and contribute to the areas of mechatronic design, sensor processing, feedback controls, motion planning, and probabilistic reasoning methods. The result of this study is a set of key experiments and guidelines to deal with collisions in mobile robots and robotic manipulators. This study aims at influencing future studies on field operations of robots and accelerate the employment of advanced robots in our daily environments without compromising our safety.
Full-Body Collision Detection and Reaction with Omnidirectional Mobile Platforms: A Step Towards Safe Human-Robot Interaction
Jan 20, 2015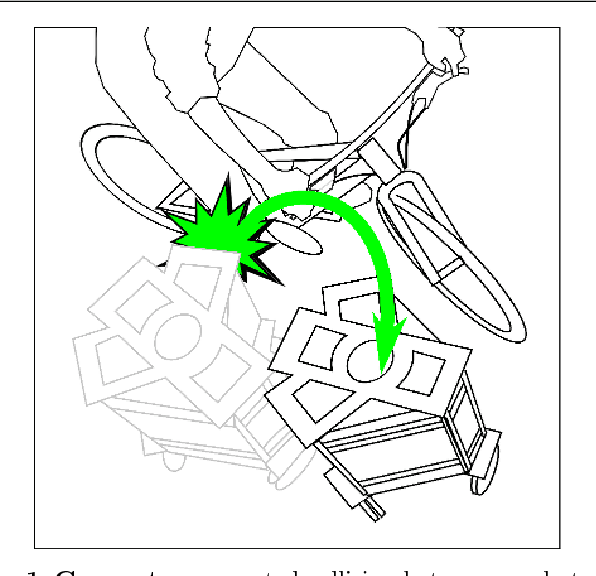
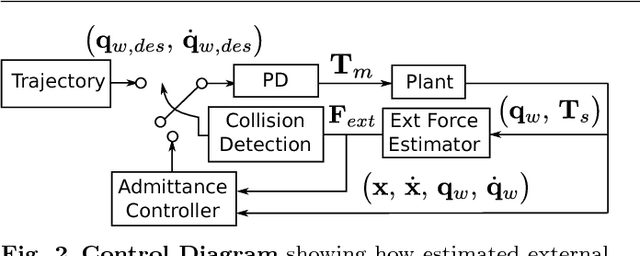
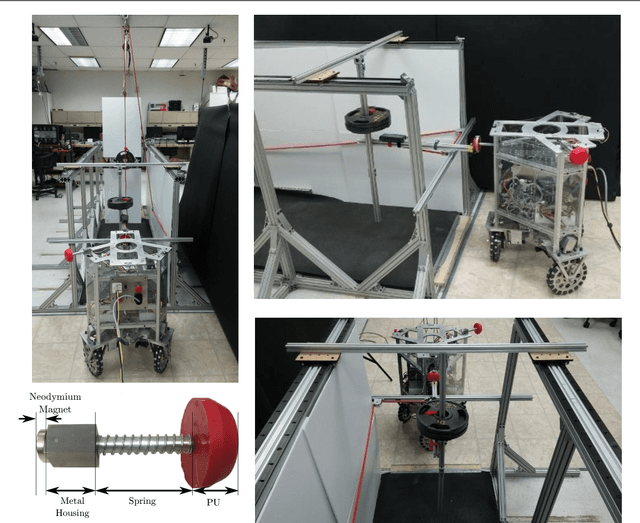
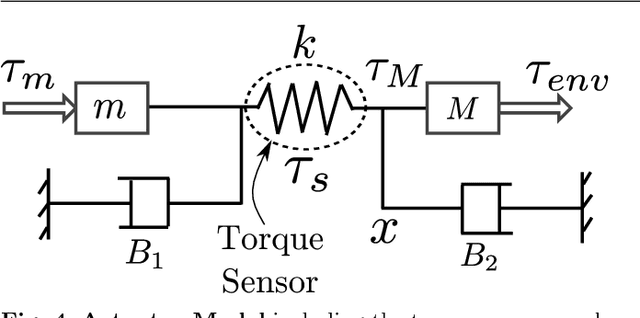
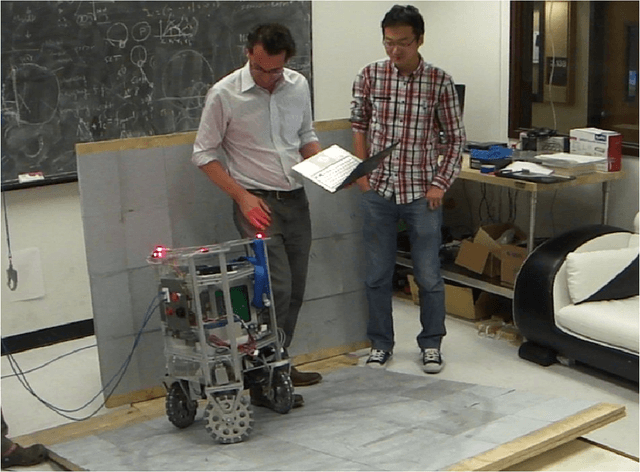
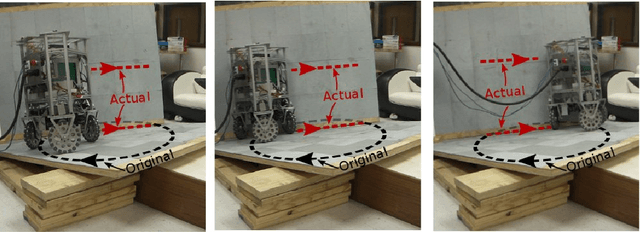
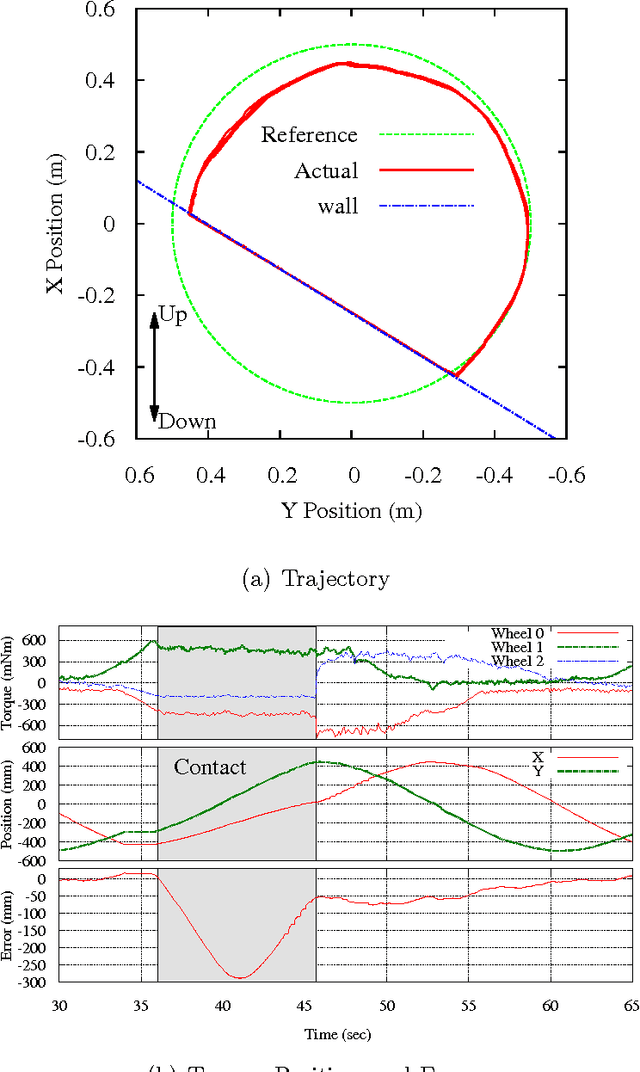
In this paper, we develop estimation and control methods for quickly reacting to collisions between omnidirectional mobile platforms and their environment. To enable the full-body detection of external forces, we use torque sensors located in the robot's drivetrain. Using model based techniques we estimate, with good precision, the location, direction, and magnitude of collision forces, and we develop an admittance controller that achieves a low effective mass in reaction to them. For experimental testing, we use a facility containing a calibrated collision dummy and our holonomic mobile platform. We subsequently explore collisions with the dummy colliding against a stationary base and the base colliding against a stationary dummy. Overall, we accomplish fast reaction times and a reduction of impact forces. A proof of concept experiment presents various parts of the mobile platform, including the wheels, colliding safely with humans.
Stability and Performance Limits of Latency-Prone Distributed Feedback Controllers
Jan 13, 2015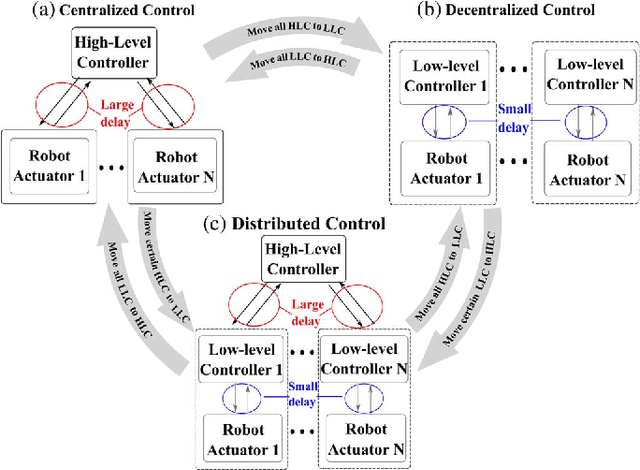
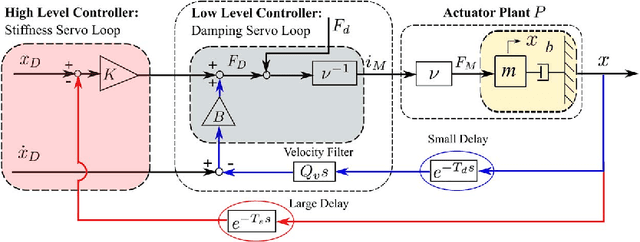
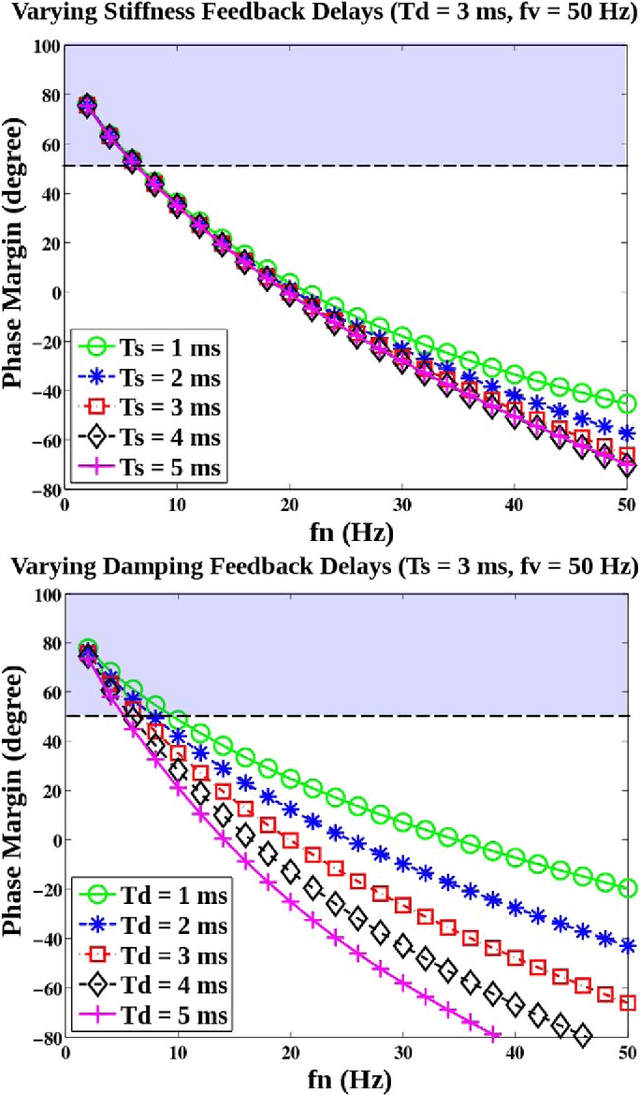
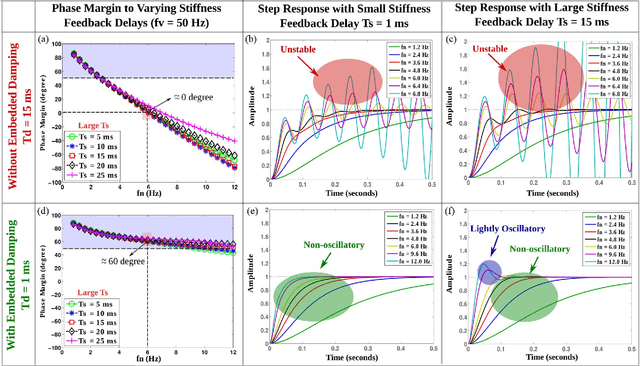
Robotic control systems are increasingly relying on distributed feedback controllers to tackle complex sensing and decision problems such as those found in highly articulated human-centered robots. These demands come at the cost of a growing computational burden and, as a result, larger controller latencies. To maximize robustness to mechanical disturbances by maximizing control feedback gains, this paper emphasizes the necessity for compromise between high- and low-level feedback control effort in distributed controllers. Specifically, the effect of distributed impedance controllers is studied where damping feedback effort is executed in close proximity to the control plant and stiffness feedback effort is executed in a latency-prone centralized control process. A central observation is that the stability of high impedance distributed controllers is very sensitive to damping feedback delay but much less to stiffness feedback delay. This study pursues a detailed analysis of this observation that leads to a physical understanding of the disparity. Then a practical controller breakdown gain rule is derived to aim at enabling control designers to consider the benefits of implementing their control applications in a distributed fashion. These considerations are further validated through the analysis, simulation and experimental testing on high performance actuators and on an omnidirectional mobile base.