 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Collision Management in Dynamic Environments for Human-Centered Robots
Paper and Code
Nov 07, 2017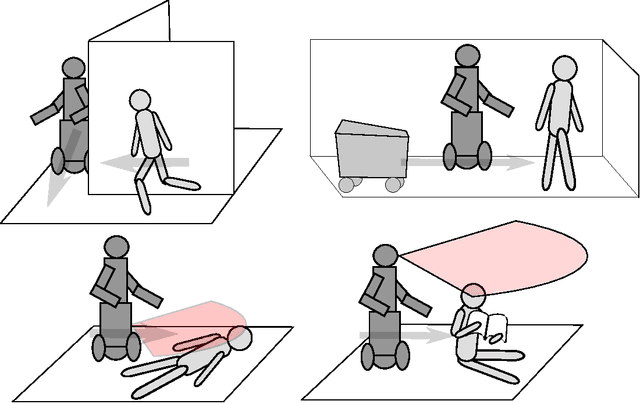
In this context, a major focus of this thesis is on unintentional collisions, where a straight goal is to eliminate injury from users and passerby's via realtime sensing and control systems. A less obvious focus is to combine collision response with tools from motion planning in order to produce intelligent safety behaviors that ensure the safety of multiple people or objects. Yet, an even more challenging problem is to anticipate future collisions between objects external to the robot and have the robot intervene to prevent imminent accidents. In this dissertation, we study all of these sophisticated flavors of collision reaction and intervention. We investigate in-depth multiple key and interesting topics related to collisions and safety of mobile robots and robotic manipulators operating in human environments. Overall we deeply investigate collisions from many perspectives and develop techniques that borrow and contribute to the areas of mechatronic design, sensor processing, feedback controls, motion planning, and probabilistic reasoning methods. The result of this study is a set of key experiments and guidelines to deal with collisions in mobile robots and robotic manipulators. This study aims at influencing future studies on field operations of robots and accelerate the employment of advanced robots in our daily environments without compromising our safety.