 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull-Body Collision Detection and Reaction with Omnidirectional Mobile Platforms: A Step Towards Safe Human-Robot Interaction
Paper and Code
Jan 20, 2015
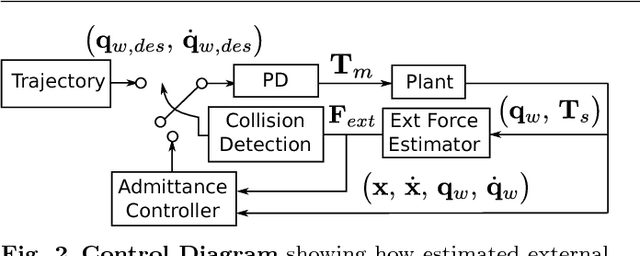
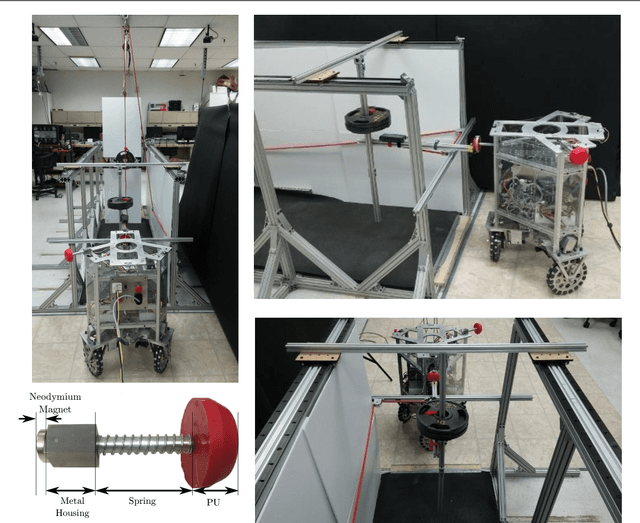
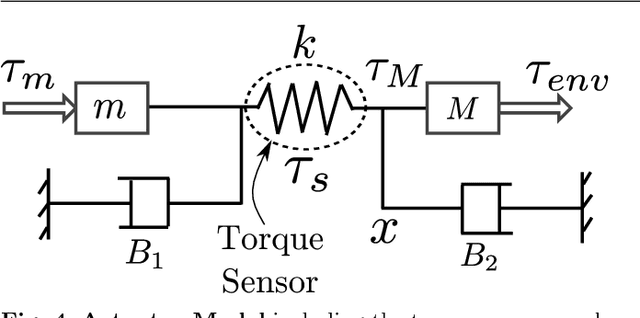
In this paper, we develop estimation and control methods for quickly reacting to collisions between omnidirectional mobile platforms and their environment. To enable the full-body detection of external forces, we use torque sensors located in the robot's drivetrain. Using model based techniques we estimate, with good precision, the location, direction, and magnitude of collision forces, and we develop an admittance controller that achieves a low effective mass in reaction to them. For experimental testing, we use a facility containing a calibrated collision dummy and our holonomic mobile platform. We subsequently explore collisions with the dummy colliding against a stationary base and the base colliding against a stationary dummy. Overall, we accomplish fast reaction times and a reduction of impact forces. A proof of concept experiment presents various parts of the mobile platform, including the wheels, colliding safely with humans.