 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Multiobjective Evolutionary Algorithm based on Decomposition for Solving the Unit Commitment Problem
Oct 23, 2014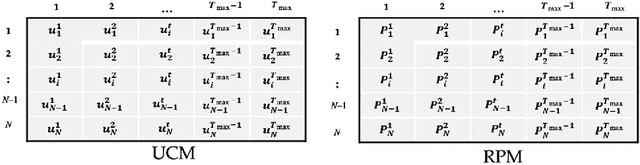
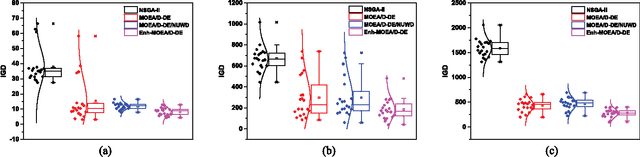
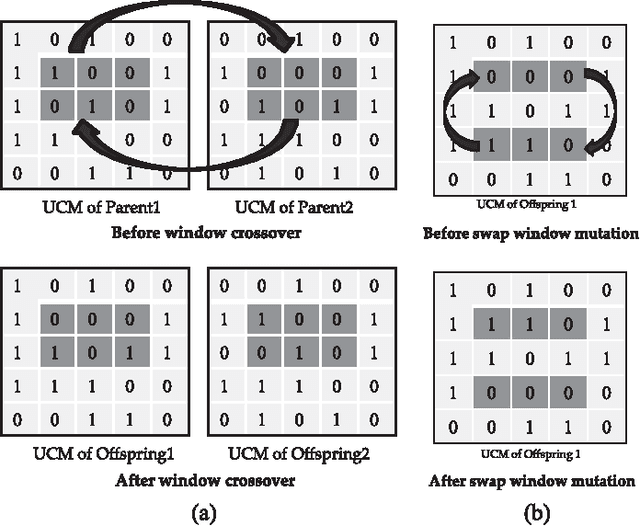
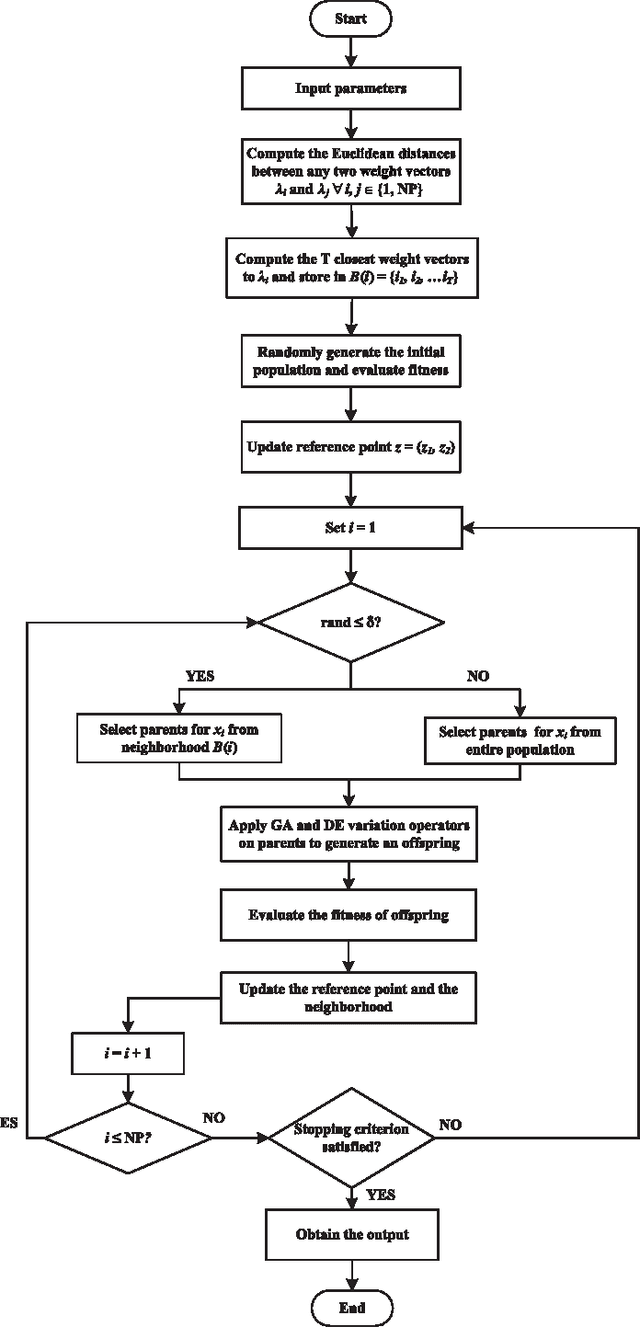
The unit commitment (UC) problem is a nonlinear, high-dimensional, highly constrained, mixed-integer power system optimization problem and is generally solved in the literature considering minimizing the system operation cost as the only objective. However, due to increasing environmental concerns, the recent attention has shifted to incorporating emission in the problem formulation. In this paper, a multi-objective evolutionary algorithm based on decomposition (MOEA/D) is proposed to solve the UC problem as a multi-objective optimization problem considering minimizing cost and emission as the multiple objec- tives. Since, UC problem is a mixed-integer optimization problem consisting of binary UC variables and continuous power dispatch variables, a novel hybridization strategy is proposed within the framework of MOEA/D such that genetic algorithm (GA) evolves the binary variables while differential evolution (DE) evolves the continuous variables. Further, a novel non-uniform weight vector distribution strategy is proposed and a parallel island model based on combination of MOEA/D with uniform and non-uniform weight vector distribution strategy is implemented to enhance the performance of the presented algorithm. Extensive case studies are presented on different test systems and the effectiveness of the proposed hybridization strategy, the non-uniform weight vector distribution strategy and parallel island model is verified through stringent simulated results. Further, exhaustive benchmarking against the algorithms proposed in the literature is presented to demonstrate the superiority of the proposed algorithm in obtaining significantly better converged and uniformly distributed trade-off solutions.
Multi-Agent Shape Formation and Tracking Inspired from a Social Foraging Dynamics
Oct 16, 2014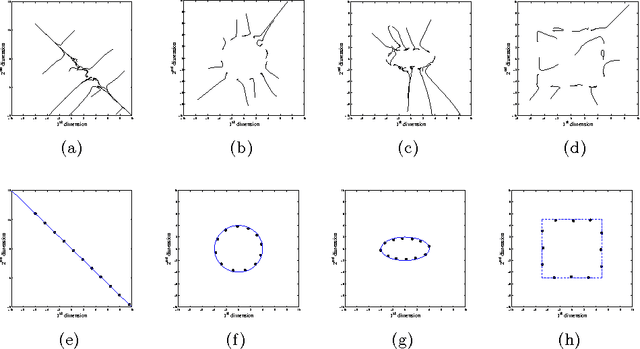
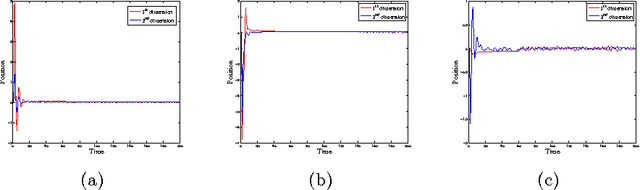
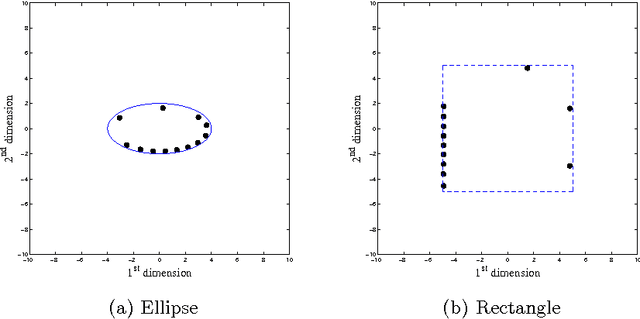

Principle of Swarm Intelligence has recently found widespread application in formation control and automated tracking by the automated multi-agent system. This article proposes an elegant and effective method inspired by foraging dynamics to produce geometric-patterns by the search agents. Starting from a random initial orientation, it is investigated how the foraging dynamics can be modified to achieve convergence of the agents on the desired pattern with almost uniform density. Guided through the proposed dynamics, the agents can also track a moving point by continuously circulating around the point. An analytical treatment supported with computer simulation results is provided to better understand the convergence behaviour of the system.