 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Shape Formation and Tracking Inspired from a Social Foraging Dynamics
Paper and Code
Oct 16, 2014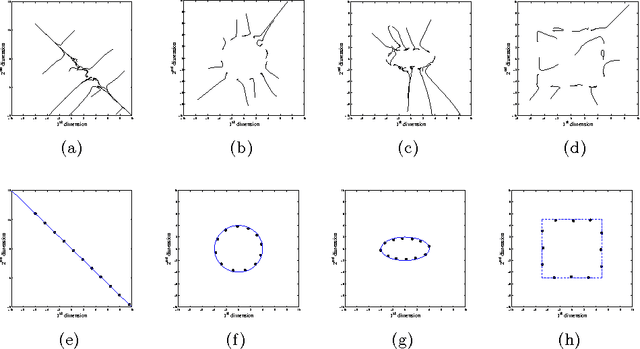
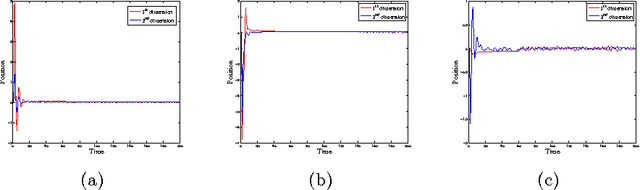
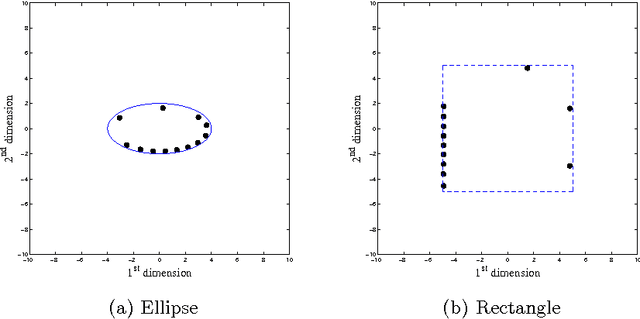

Principle of Swarm Intelligence has recently found widespread application in formation control and automated tracking by the automated multi-agent system. This article proposes an elegant and effective method inspired by foraging dynamics to produce geometric-patterns by the search agents. Starting from a random initial orientation, it is investigated how the foraging dynamics can be modified to achieve convergence of the agents on the desired pattern with almost uniform density. Guided through the proposed dynamics, the agents can also track a moving point by continuously circulating around the point. An analytical treatment supported with computer simulation results is provided to better understand the convergence behaviour of the system.