 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwipeBot: DNN-based Autonomous Robot Navigation among Movable Obstacles in Cluttered Environments
May 08, 2023In this paper, we propose a novel approach to wheeled robot navigation through an environment with movable obstacles. A robot exploits knowledge about different obstacle classes and selects the minimally invasive action to perform to clear the path. We trained a convolutional neural network (CNN), so the robot can classify an RGB-D image and decide whether to push a blocking object and which force to apply. After known objects are segmented, they are being projected to a cost-map, and a robot calculates an optimal path to the goal. If the blocking objects are allowed to be moved, a robot drives through them while pushing them away. We implemented our algorithm in ROS, and an extensive set of simulations showed that the robot successfully overcomes the blocked regions. Our approach allows a robot to successfully build a path through regions, where it would have stuck with traditional path-planning techniques.
Deep Negative Volume Segmentation
Jun 22, 2020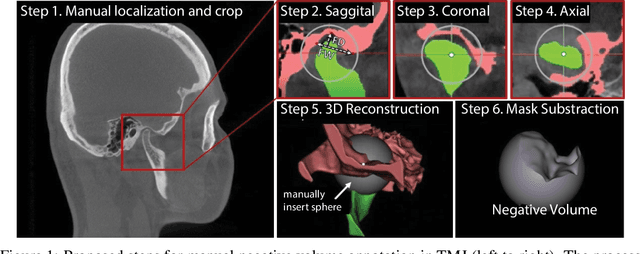
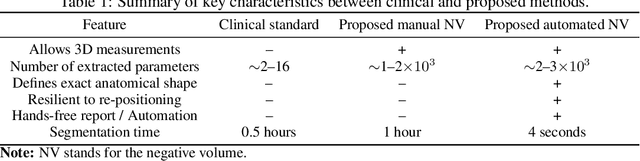
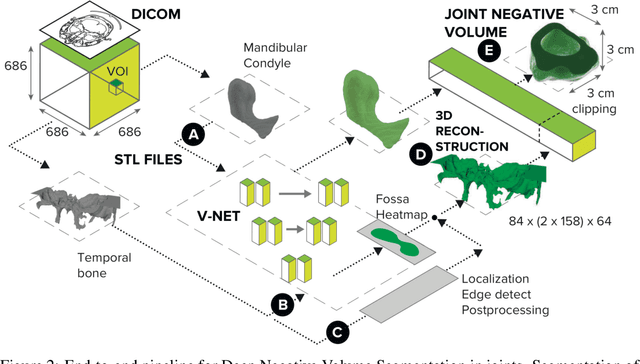
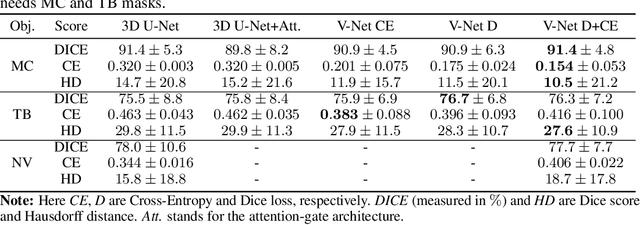
Clinical examination of three-dimensional image data of compound anatomical objects, such as complex joints, remains a tedious process, demanding the time and the expertise of physicians. For instance, automation of the segmentation task of the TMJ (temporomandibular joint) has been hindered by its compound three-dimensional shape, multiple overlaid textures, an abundance of surrounding irregularities in the skull, and a virtually omnidirectional range of the jaw's motion - all of which extend the manual annotation process to more than an hour per patient. To address the challenge, we invent a new angle to the 3D segmentation task: namely, we propose to segment empty spaces between all the tissues surrounding the object - the so-called negative volume segmentation. Our approach is an end-to-end pipeline that comprises a V-Net for bone segmentation, a 3D volume construction by inflation of the reconstructed bone head in all directions along the normal vector to its mesh faces. Eventually confined within the skull bones, the inflated surface occupies the entire "negative" space in the joint, effectively providing a geometrical/topological metric of the joint's health. We validate the idea on the CT scans in a 50-patient dataset, annotated by experts in maxillofacial medicine, quantitatively compare the asymmetry given the left and the right negative volumes, and automate the entire framework for clinical adoption.