 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom 2D to 3D: AISG-SLA Visual Localization Challenge
Jul 26, 2024



Research in 3D mapping is crucial for smart city applications, yet the cost of acquiring 3D data often hinders progress. Visual localization, particularly monocular camera position estimation, offers a solution by determining the camera's pose solely through visual cues. However, this task is challenging due to limited data from a single camera. To tackle these challenges, we organized the AISG-SLA Visual Localization Challenge (VLC) at IJCAI 2023 to explore how AI can accurately extract camera pose data from 2D images in 3D space. The challenge attracted over 300 participants worldwide, forming 50+ teams. Winning teams achieved high accuracy in pose estimation using images from a car-mounted camera with low frame rates. The VLC dataset is available for research purposes upon request via vlc-dataset@aisingapore.org.
MotionCNN: A Strong Baseline for Motion Prediction in Autonomous Driving
Jun 05, 2022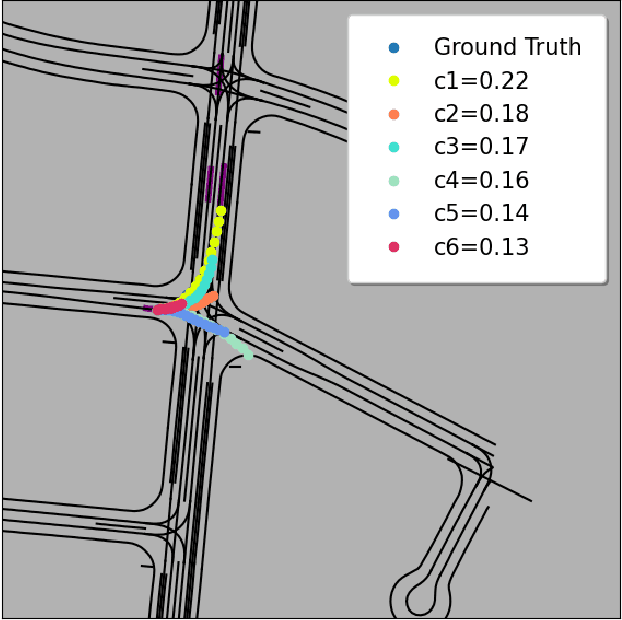
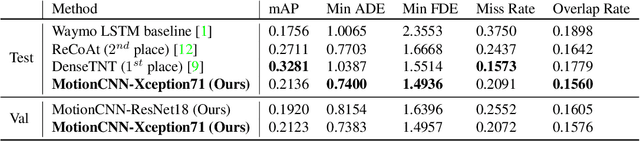
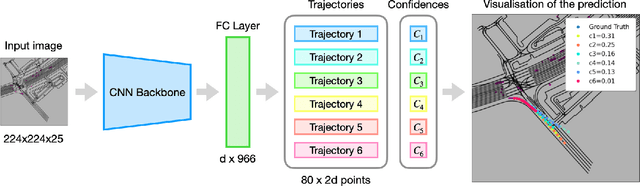
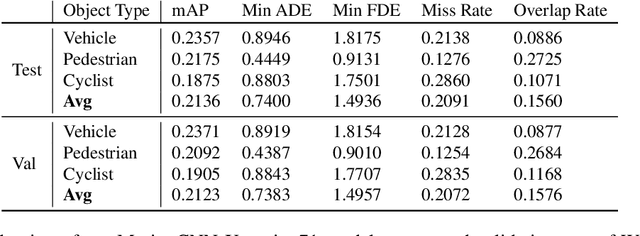
To plan a safe and efficient route, an autonomous vehicle should anticipate future motions of other agents around it. Motion prediction is an extremely challenging task that recently gained significant attention within the research community. In this work, we present a simple and yet very strong baseline for multimodal motion prediction based purely on Convolutional Neural Networks. While being easy-to-implement, the proposed approach achieves competitive performance compared to the state-of-the-art methods and ranks 3rd on the 2021 Waymo Open Dataset Motion Prediction Challenge. Our source code is publicly available at GitHub