 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain Generalization for Domain-Linked Classes
Jun 01, 2023



Domain generalization (DG) focuses on transferring domain-invariant knowledge from multiple source domains (available at train time) to an, a priori, unseen target domain(s). This requires a class to be expressed in multiple domains for the learning algorithm to break the spurious correlations between domain and class. However, in the real-world, classes may often be domain-linked, i.e. expressed only in a specific domain, which leads to extremely poor generalization performance for these classes. In this work, we aim to learn generalizable representations for these domain-linked classes by transferring domain-invariant knowledge from classes expressed in multiple source domains (domain-shared classes). To this end, we introduce this task to the community and propose a Fair and cONtrastive feature-space regularization algorithm for Domain-linked DG, FOND. Rigorous and reproducible experiments with baselines across popular DG tasks demonstrate our method and its variants' ability to accomplish state-of-the-art DG results for domain-linked classes. We also provide practical insights on data conditions that increase domain-linked class generalizability to tackle real-world data scarcity.
Building Spatio-temporal Transformers for Egocentric 3D Pose Estimation
Jun 09, 2022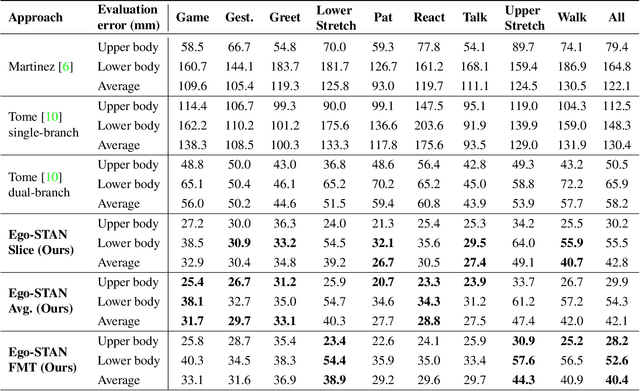
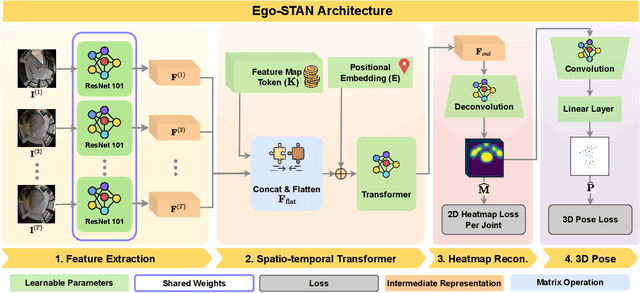
Egocentric 3D human pose estimation (HPE) from images is challenging due to severe self-occlusions and strong distortion introduced by the fish-eye view from the head mounted camera. Although existing works use intermediate heatmap-based representations to counter distortion with some success, addressing self-occlusion remains an open problem. In this work, we leverage information from past frames to guide our self-attention-based 3D HPE estimation procedure -- Ego-STAN. Specifically, we build a spatio-temporal Transformer model that attends to semantically rich convolutional neural network-based feature maps. We also propose feature map tokens: a new set of learnable parameters to attend to these feature maps. Finally, we demonstrate Ego-STAN's superior performance on the xR-EgoPose dataset where it achieves a 30.6% improvement on the overall mean per-joint position error, while leading to a 22% drop in parameters compared to the state-of-the-art.