 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnidirectional Human-Robot-Human Physical Interaction for Gait Training
Sep 17, 2024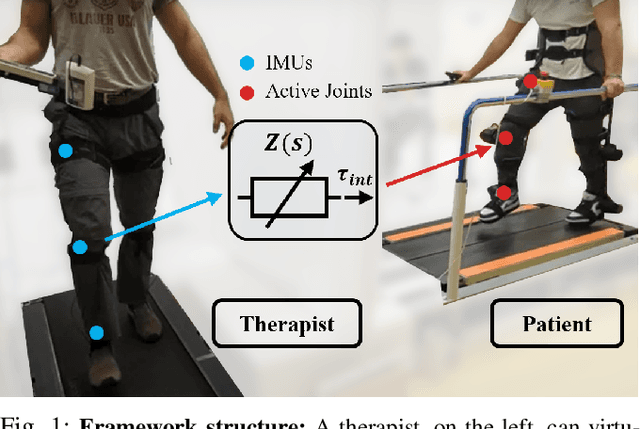
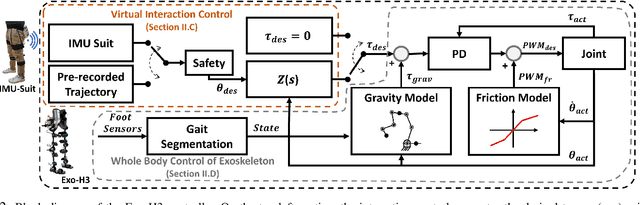
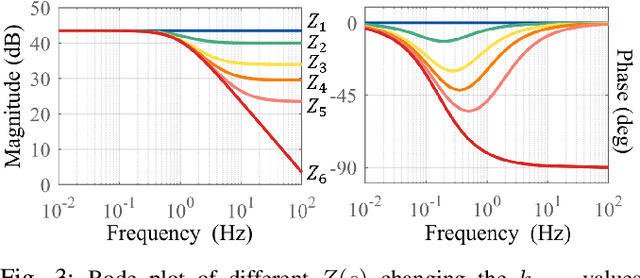
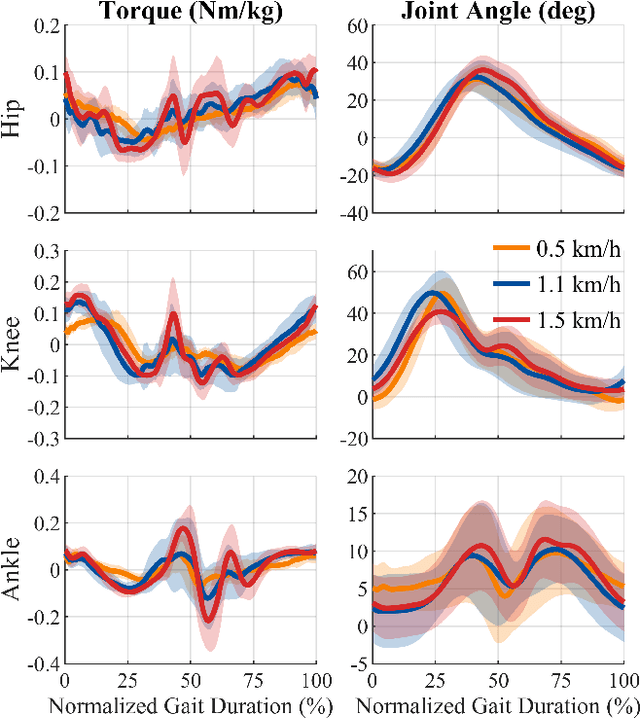
This work presents a novel rehabilitation framework designed for a therapist, wearing an inertial measurement unit (IMU) suit, to virtually interact with a lower-limb exoskeleton worn by a patient with motor impairments. This framework aims to harmonize the skills and knowledge of the therapist with the capabilities of the exoskeleton. The therapist can guide the patient's movements by moving their own joints and making real-time adjustments to meet the patient's needs, while reducing the physical effort of the therapist. This eliminates the need for a predefined trajectory for the patient to follow, as in conventional robotic gait training. For the virtual interaction medium between the therapist and patient, we propose an impedance profile that is stiff at low frequencies and less stiff at high frequencies, that can be tailored to individual patient needs and different stages of rehabilitation. The desired interaction torque from this medium is commanded to a whole-exoskeleton closed-loop compensation controller. The proposed virtual interaction framework was evaluated with a pair of unimpaired individuals in different teacher-student gait training exercises. Results show the proposed interaction control effectively transmits haptic cues, informing future applications in rehabilitation scenarios.
Deep-Learning Estimation of Weight Distribution Using Joint Kinematics for Lower-Limb Exoskeleton Control
Feb 06, 2024



In the control of lower-limb exoskeletons with feet, the phase in the gait cycle can be identified by monitoring the weight distribution at the feet. This phase information can be used in the exoskeleton's controller to compensate the dynamics of the exoskeleton and to assign impedance parameters. Typically the weight distribution is calculated using data from sensors such as treadmill force plates or insole force sensors. However, these solutions increase both the setup complexity and cost. For this reason, we propose a deep-learning approach that uses a short time window of joint kinematics to predict the weight distribution of an exoskeleton in real time. The model was trained on treadmill walking data from six users wearing a four-degree-of-freedom exoskeleton and tested in real time on three different users wearing the same device. This test set includes two users not present in the training set to demonstrate the model's ability to generalize across individuals. Results show that the proposed method is able to fit the actual weight distribution with R2=0.9 and is suitable for real-time control with prediction times less than 1 ms. Experiments in closed-loop exoskeleton control show that deep-learning-based weight distribution estimation can be used to replace force sensors in overground and treadmill walking.
Exoskeleton-Mediated Physical Human-Human Interaction for a Sit-to-Stand Rehabilitation Task
Oct 09, 2023



Sit-to-Stand (StS) is a fundamental daily activity that can be challenging for stroke survivors due to strength, motor control, and proprioception deficits in their lower limbs. Existing therapies involve repetitive StS exercises, but these can be physically demanding for therapists while assistive devices may limit patient participation and hinder motor learning. To address these challenges, this work proposes the use of two lower-limb exoskeletons to mediate physical interaction between therapists and patients during a StS rehabilitative task. This approach offers several advantages, including improved therapist-patient interaction, safety enforcement, and performance quantification. The whole body control of the two exoskeletons transmits online feedback between the two users, but at the same time assists in movement and ensures balance, and thus helping subjects with greater difficulty. In this study we present the architecture of the framework, presenting and discussing some technical choices made in the design.
Virtual Physical Coupling of Two Lower-Limb Exoskeletons
Jul 20, 2023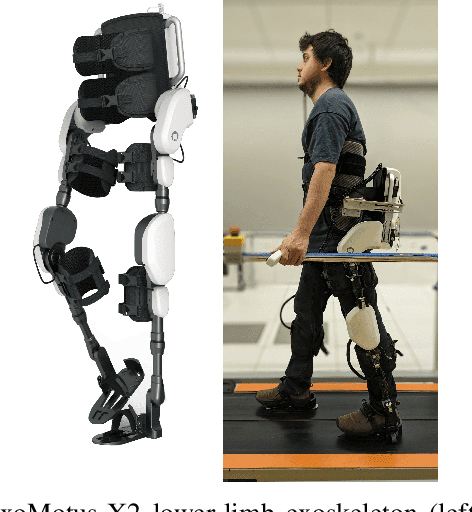


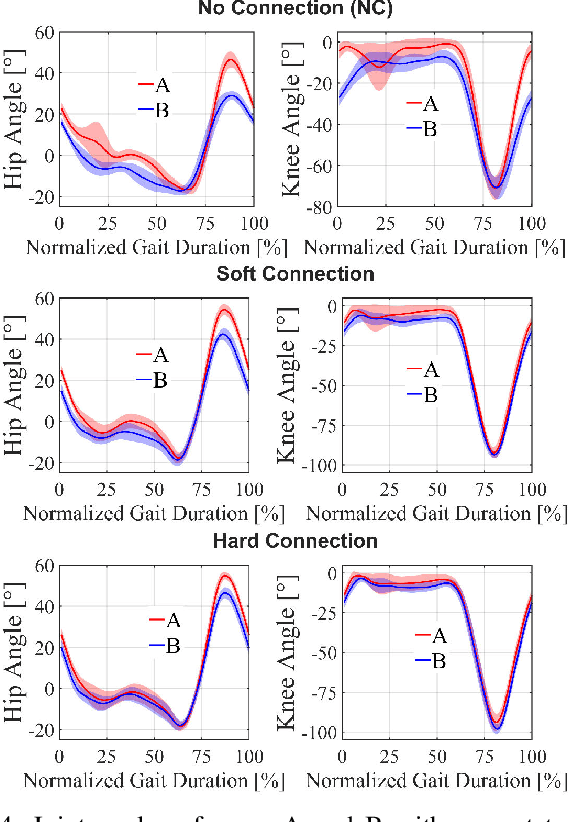
Physical interaction between individuals plays an important role in human motor learning and performance during shared tasks. Using robotic devices, researchers have studied the effects of dyadic haptic interaction mostly focusing on the upper-limb. Developing infrastructure that enables physical interactions between multiple individuals' lower limbs can extend the previous work and facilitate investigation of new dyadic lower-limb rehabilitation schemes. We designed a system to render haptic interactions between two users while they walk in multi-joint lower-limb exoskeletons. Specifically, we developed an infrastructure where desired interaction torques are commanded to the individual lower-limb exoskeletons based on the users' kinematics and the properties of the virtual coupling. In this pilot study, we demonstrated the capacity of the platform to render different haptic properties (e.g., soft and hard), different haptic connection types (e.g., bidirectional and unidirectional), and connections expressed in joint space and in task space. With haptic connection, dyads generated synchronized movement, and the difference between joint angles decreased as the virtual stiffness increased. This is the first study where multi-joint dyadic haptic interactions are created between lower-limb exoskeletons. This platform will be used to investigate effects of haptic interaction on motor learning and task performance during walking, a complex and meaningful task for gait rehabilitation.
Haptic Transparency and Interaction Force Control for a Lower-Limb Exoskeleton
Jan 16, 2023



It is an open problem to control the interaction forces of lower-limb exoskeletons designed for unrestricted overground walking, i.e., floating base exoskeletons with feet that contact the ground. For these types of exoskeletons, it is challenging to measure interaction forces as it is not feasible to implement force/torque sensors at every contact between the user and the exoskeleton. Moreover, it is important to compensate for the exoskeleton's whole-body gravitational and dynamical forces. Previous works either simplified the dynamic model by treating the legs as independent double pendulums, or they did not close the loop with interaction force feedback. This paper presents a novel method to calculate interaction torques during the complete gait cycle by using whole-body dynamics and joint torque measurements on a hip-knee exoskeleton. Furthermore, we propose a constrained optimization scheme combined with a virtual model controller to track desired interaction torques in a closed loop while considering physical limits and safety considerations. Together, we call this approach whole-exoskeleton closed-loop compensation (WECC) control. We evaluated the haptic transparency and spring-damper rendering performance of WECC control on three subjects. We also compared the performance of WECC with a controller based on a simplified dynamic model and a passive version of the exoskeleton with disassembled drives. The WECC controller resulted in consistent interaction torque tracking during the whole gait cycle for both zero and nonzero desired interaction torques. On the contrary, the simplified controller failed to track desired interaction torques during the stance phase. The proposed interaction force control method is especially beneficial for heavy lower-limb exoskeletons where the dynamics of the entire exoskeleton should be compensated.