 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnidirectional Human-Robot-Human Physical Interaction for Gait Training
Paper and Code
Sep 17, 2024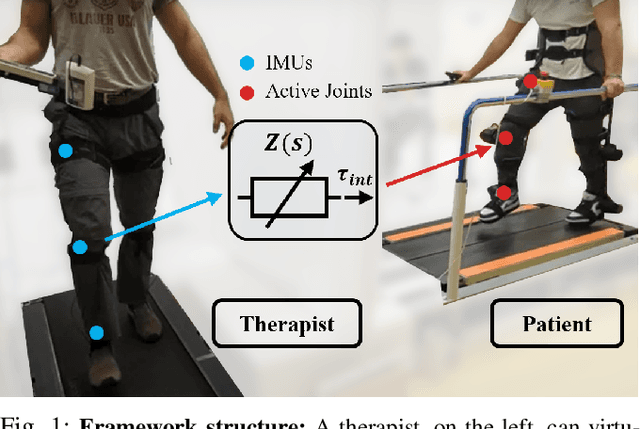
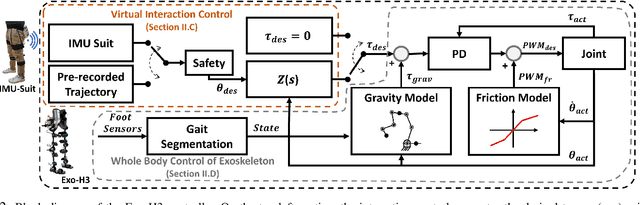
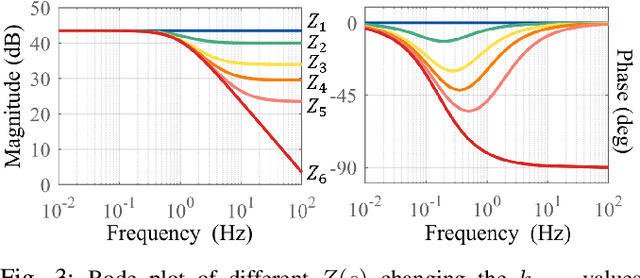
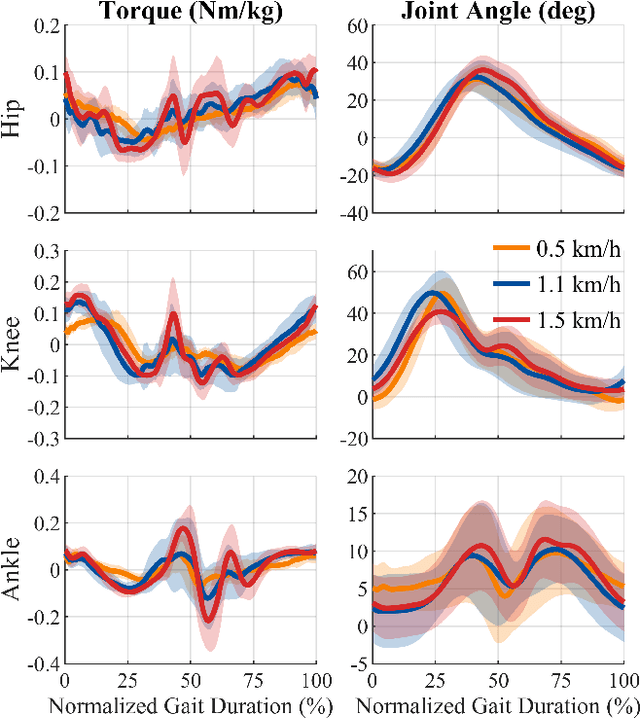
This work presents a novel rehabilitation framework designed for a therapist, wearing an inertial measurement unit (IMU) suit, to virtually interact with a lower-limb exoskeleton worn by a patient with motor impairments. This framework aims to harmonize the skills and knowledge of the therapist with the capabilities of the exoskeleton. The therapist can guide the patient's movements by moving their own joints and making real-time adjustments to meet the patient's needs, while reducing the physical effort of the therapist. This eliminates the need for a predefined trajectory for the patient to follow, as in conventional robotic gait training. For the virtual interaction medium between the therapist and patient, we propose an impedance profile that is stiff at low frequencies and less stiff at high frequencies, that can be tailored to individual patient needs and different stages of rehabilitation. The desired interaction torque from this medium is commanded to a whole-exoskeleton closed-loop compensation controller. The proposed virtual interaction framework was evaluated with a pair of unimpaired individuals in different teacher-student gait training exercises. Results show the proposed interaction control effectively transmits haptic cues, informing future applications in rehabilitation scenarios.