 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnidirectional Human-Robot-Human Physical Interaction for Gait Training
Sep 17, 2024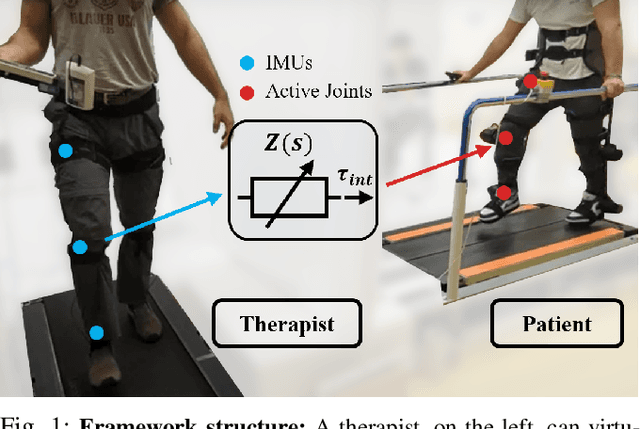
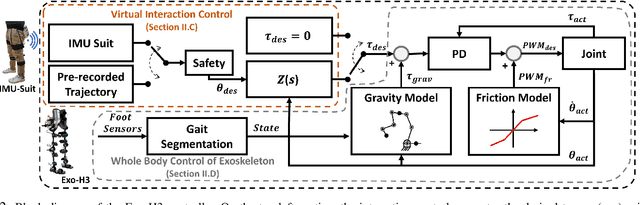
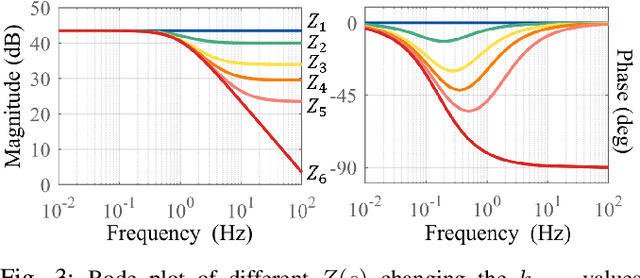
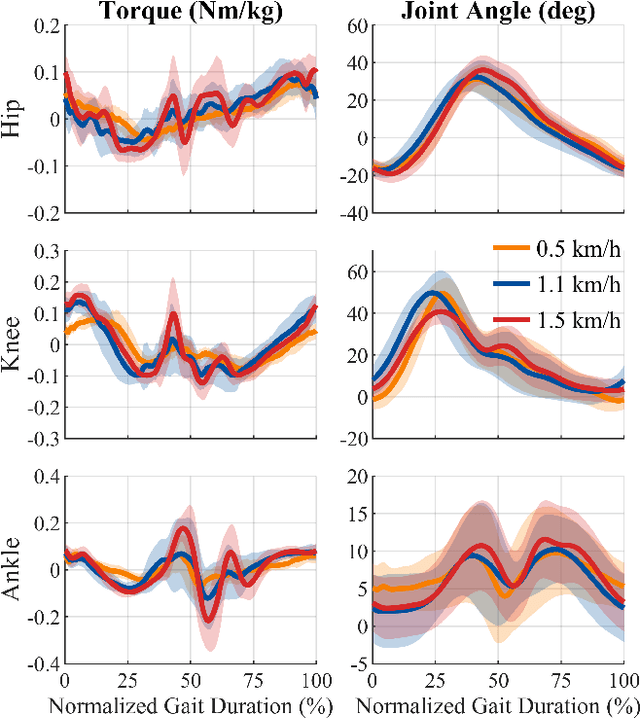
This work presents a novel rehabilitation framework designed for a therapist, wearing an inertial measurement unit (IMU) suit, to virtually interact with a lower-limb exoskeleton worn by a patient with motor impairments. This framework aims to harmonize the skills and knowledge of the therapist with the capabilities of the exoskeleton. The therapist can guide the patient's movements by moving their own joints and making real-time adjustments to meet the patient's needs, while reducing the physical effort of the therapist. This eliminates the need for a predefined trajectory for the patient to follow, as in conventional robotic gait training. For the virtual interaction medium between the therapist and patient, we propose an impedance profile that is stiff at low frequencies and less stiff at high frequencies, that can be tailored to individual patient needs and different stages of rehabilitation. The desired interaction torque from this medium is commanded to a whole-exoskeleton closed-loop compensation controller. The proposed virtual interaction framework was evaluated with a pair of unimpaired individuals in different teacher-student gait training exercises. Results show the proposed interaction control effectively transmits haptic cues, informing future applications in rehabilitation scenarios.
Haptic Transparency and Interaction Force Control for a Lower-Limb Exoskeleton
Jan 16, 2023



It is an open problem to control the interaction forces of lower-limb exoskeletons designed for unrestricted overground walking, i.e., floating base exoskeletons with feet that contact the ground. For these types of exoskeletons, it is challenging to measure interaction forces as it is not feasible to implement force/torque sensors at every contact between the user and the exoskeleton. Moreover, it is important to compensate for the exoskeleton's whole-body gravitational and dynamical forces. Previous works either simplified the dynamic model by treating the legs as independent double pendulums, or they did not close the loop with interaction force feedback. This paper presents a novel method to calculate interaction torques during the complete gait cycle by using whole-body dynamics and joint torque measurements on a hip-knee exoskeleton. Furthermore, we propose a constrained optimization scheme combined with a virtual model controller to track desired interaction torques in a closed loop while considering physical limits and safety considerations. Together, we call this approach whole-exoskeleton closed-loop compensation (WECC) control. We evaluated the haptic transparency and spring-damper rendering performance of WECC control on three subjects. We also compared the performance of WECC with a controller based on a simplified dynamic model and a passive version of the exoskeleton with disassembled drives. The WECC controller resulted in consistent interaction torque tracking during the whole gait cycle for both zero and nonzero desired interaction torques. On the contrary, the simplified controller failed to track desired interaction torques during the stance phase. The proposed interaction force control method is especially beneficial for heavy lower-limb exoskeletons where the dynamics of the entire exoskeleton should be compensated.