 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Physical Coupling of Two Lower-Limb Exoskeletons
Paper and Code
Jul 20, 2023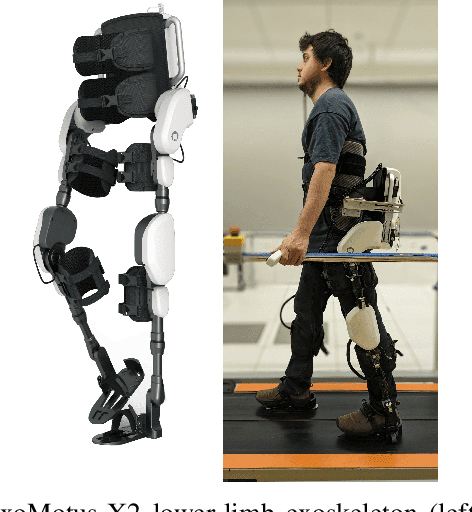


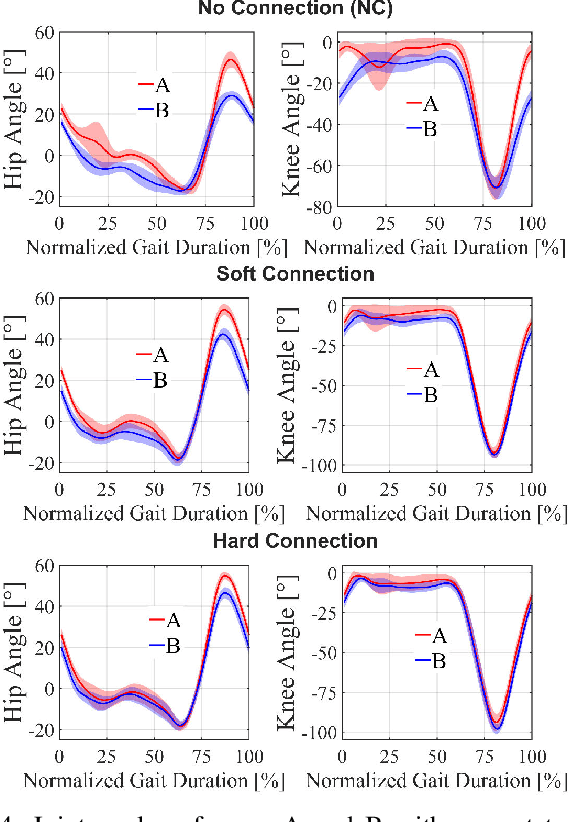
Physical interaction between individuals plays an important role in human motor learning and performance during shared tasks. Using robotic devices, researchers have studied the effects of dyadic haptic interaction mostly focusing on the upper-limb. Developing infrastructure that enables physical interactions between multiple individuals' lower limbs can extend the previous work and facilitate investigation of new dyadic lower-limb rehabilitation schemes. We designed a system to render haptic interactions between two users while they walk in multi-joint lower-limb exoskeletons. Specifically, we developed an infrastructure where desired interaction torques are commanded to the individual lower-limb exoskeletons based on the users' kinematics and the properties of the virtual coupling. In this pilot study, we demonstrated the capacity of the platform to render different haptic properties (e.g., soft and hard), different haptic connection types (e.g., bidirectional and unidirectional), and connections expressed in joint space and in task space. With haptic connection, dyads generated synchronized movement, and the difference between joint angles decreased as the virtual stiffness increased. This is the first study where multi-joint dyadic haptic interactions are created between lower-limb exoskeletons. This platform will be used to investigate effects of haptic interaction on motor learning and task performance during walking, a complex and meaningful task for gait rehabilitation.