 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning-Based Real-Time Detection of Compensatory Trunk Movements Using Trunk-Wrist Inertial Measurement Units
Apr 14, 2026Compensatory trunk movements (CTMs) are commonly observed after stroke and can lead to maladaptive movement patterns, limiting targeted training of affected structures. Objective, continuous detection of CTMs during therapy and activities of daily living remains challenging due to the typically complex measurements setups required, as well as limited applicability for real-time use. This study investigates whether a two-inertial measurement unit configuration enables reliable, real-time CTM detection using machine learning. Data were collected from ten able-bodied participants performing activities of daily living under simulated impairment conditions (elbow brace restricting flexion-extension, resistance band inducing flexor-synergy-like patterns), with synchronized optical motion capture (OMC) and manually annotated video recordings serving as reference. A systematic location-reduction analysis using OMC identified wrist and trunk kinematics as a minimal yet sufficient set of anatomical sensing locations. Using an extreme gradient boosting classifier (XGBoost) evaluated with leave-one-subject-out cross-validation, our two-IMU model achieved strong discriminative performance (macro-F1 = 0.80 +/- 0.07, MCC = 0.73 +/- 0.08; ROC-AUC > 0.93), with performance comparable to an OMC-based model and prediction timing suitable for real-time applications. Explainability analysis revealed dominant contributions from trunk dynamics and wrist-trunk interaction features. In preliminary evaluation using recordings from four participants with neurological conditions, the model retained good discriminative capability (ROC-AUC ~ 0.78), but showed reduced and variable threshold-dependent performance, highlighting challenges in clinical generalization. These results support sparse wearable sensing as a viable pathway toward scalable, real-time monitoring of CTMs during therapy and daily living.
Deep-Learning Control of Lower-Limb Exoskeletons via simplified Therapist Input
Dec 10, 2024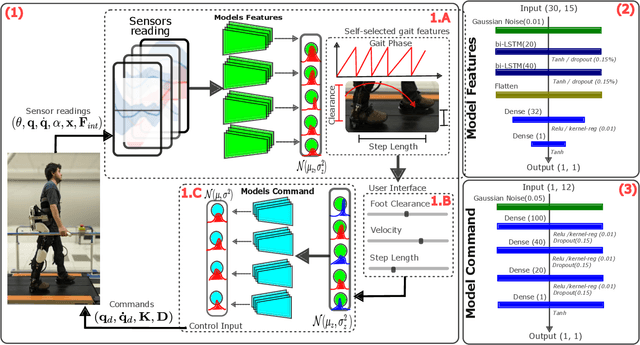
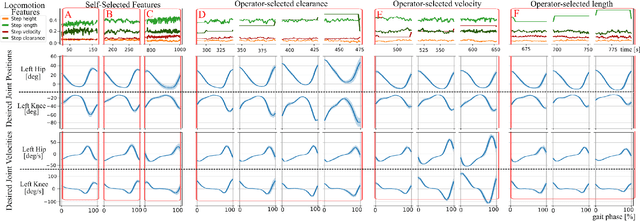
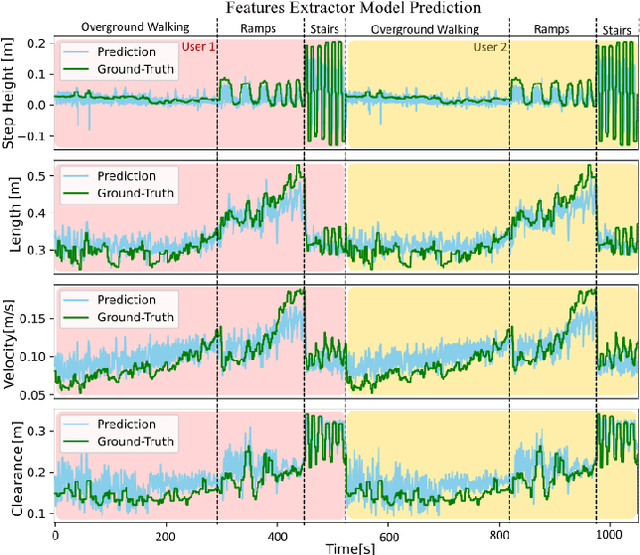
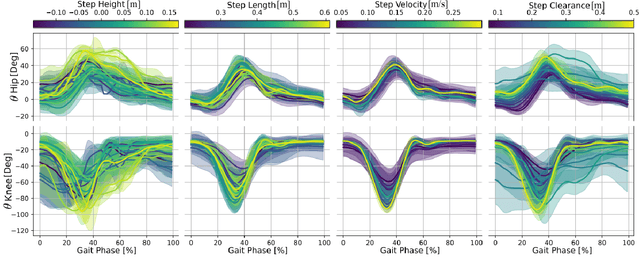
Partial-assistance exoskeletons hold significant potential for gait rehabilitation by promoting active participation during (re)learning of normative walking patterns. Typically, the control of interaction torques in partial-assistance exoskeletons relies on a hierarchical control structure. These approaches require extensive calibration due to the complexity of the controller and user-specific parameter tuning, especially for activities like stair or ramp navigation. To address the limitations of hierarchical control in exoskeletons, this work proposes a three-step, data-driven approach: (1) using recent sensor data to probabilistically infer locomotion states (landing step length, landing step height, walking velocity, step clearance, gait phase), (2) allowing therapists to modify these features via a user interface, and (3) using the adjusted locomotion features to predict the desired joint posture and model stiffness in a spring-damper system based on prediction uncertainty. We evaluated the proposed approach with two healthy participants engaging in treadmill walking and stair ascent and descent at varying speeds, with and without external modification of the gait features through a user interface. Results showed a variation in kinematics according to the gait characteristics and a negative interaction power suggesting exoskeleton assistance across the different conditions.
Deep-Learning Estimation of Weight Distribution Using Joint Kinematics for Lower-Limb Exoskeleton Control
Feb 06, 2024



In the control of lower-limb exoskeletons with feet, the phase in the gait cycle can be identified by monitoring the weight distribution at the feet. This phase information can be used in the exoskeleton's controller to compensate the dynamics of the exoskeleton and to assign impedance parameters. Typically the weight distribution is calculated using data from sensors such as treadmill force plates or insole force sensors. However, these solutions increase both the setup complexity and cost. For this reason, we propose a deep-learning approach that uses a short time window of joint kinematics to predict the weight distribution of an exoskeleton in real time. The model was trained on treadmill walking data from six users wearing a four-degree-of-freedom exoskeleton and tested in real time on three different users wearing the same device. This test set includes two users not present in the training set to demonstrate the model's ability to generalize across individuals. Results show that the proposed method is able to fit the actual weight distribution with R2=0.9 and is suitable for real-time control with prediction times less than 1 ms. Experiments in closed-loop exoskeleton control show that deep-learning-based weight distribution estimation can be used to replace force sensors in overground and treadmill walking.
Exoskeleton-Mediated Physical Human-Human Interaction for a Sit-to-Stand Rehabilitation Task
Oct 09, 2023



Sit-to-Stand (StS) is a fundamental daily activity that can be challenging for stroke survivors due to strength, motor control, and proprioception deficits in their lower limbs. Existing therapies involve repetitive StS exercises, but these can be physically demanding for therapists while assistive devices may limit patient participation and hinder motor learning. To address these challenges, this work proposes the use of two lower-limb exoskeletons to mediate physical interaction between therapists and patients during a StS rehabilitative task. This approach offers several advantages, including improved therapist-patient interaction, safety enforcement, and performance quantification. The whole body control of the two exoskeletons transmits online feedback between the two users, but at the same time assists in movement and ensures balance, and thus helping subjects with greater difficulty. In this study we present the architecture of the framework, presenting and discussing some technical choices made in the design.