 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-Learning Control of Lower-Limb Exoskeletons via simplified Therapist Input
Paper and Code
Dec 10, 2024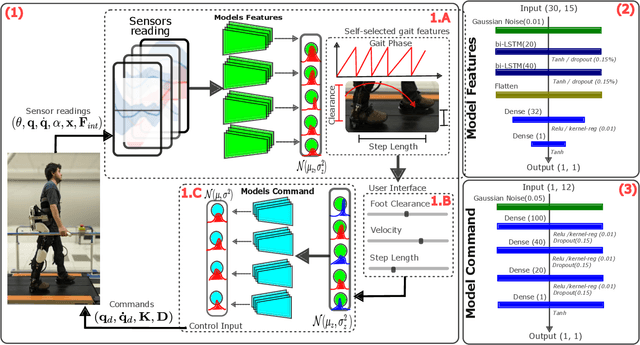
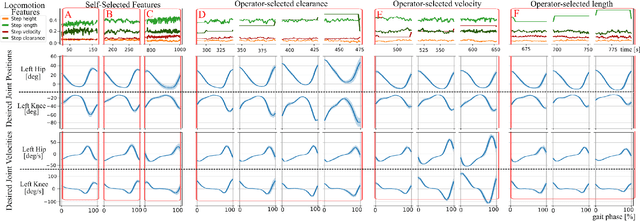
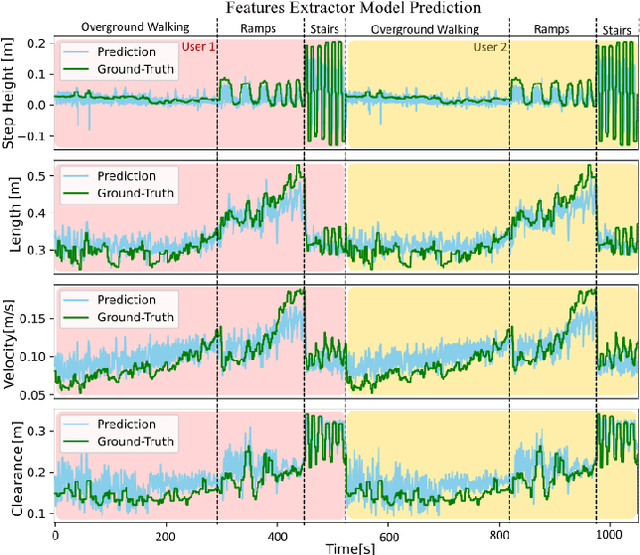
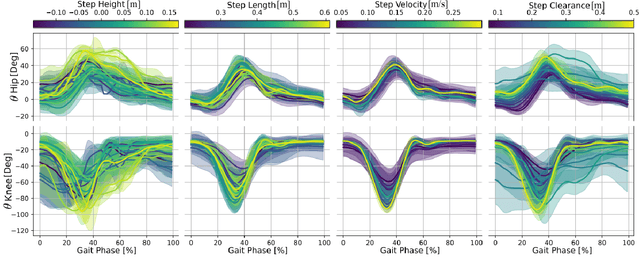
Partial-assistance exoskeletons hold significant potential for gait rehabilitation by promoting active participation during (re)learning of normative walking patterns. Typically, the control of interaction torques in partial-assistance exoskeletons relies on a hierarchical control structure. These approaches require extensive calibration due to the complexity of the controller and user-specific parameter tuning, especially for activities like stair or ramp navigation. To address the limitations of hierarchical control in exoskeletons, this work proposes a three-step, data-driven approach: (1) using recent sensor data to probabilistically infer locomotion states (landing step length, landing step height, walking velocity, step clearance, gait phase), (2) allowing therapists to modify these features via a user interface, and (3) using the adjusted locomotion features to predict the desired joint posture and model stiffness in a spring-damper system based on prediction uncertainty. We evaluated the proposed approach with two healthy participants engaging in treadmill walking and stair ascent and descent at varying speeds, with and without external modification of the gait features through a user interface. Results showed a variation in kinematics according to the gait characteristics and a negative interaction power suggesting exoskeleton assistance across the different conditions.