 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesizing Robust Adversarial Examples
Jun 07, 2018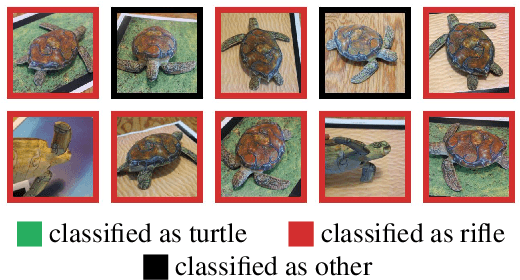
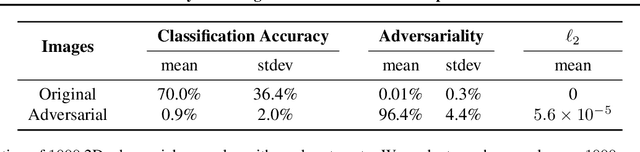
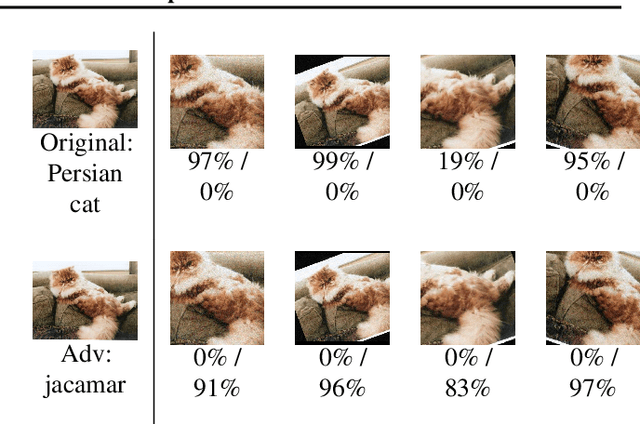
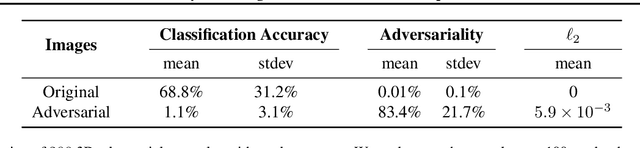
Standard methods for generating adversarial examples for neural networks do not consistently fool neural network classifiers in the physical world due to a combination of viewpoint shifts, camera noise, and other natural transformations, limiting their relevance to real-world systems. We demonstrate the existence of robust 3D adversarial objects, and we present the first algorithm for synthesizing examples that are adversarial over a chosen distribution of transformations. We synthesize two-dimensional adversarial images that are robust to noise, distortion, and affine transformation. We apply our algorithm to complex three-dimensional objects, using 3D-printing to manufacture the first physical adversarial objects. Our results demonstrate the existence of 3D adversarial objects in the physical world.
Opponent Modeling in Deep Reinforcement Learning
Sep 18, 2016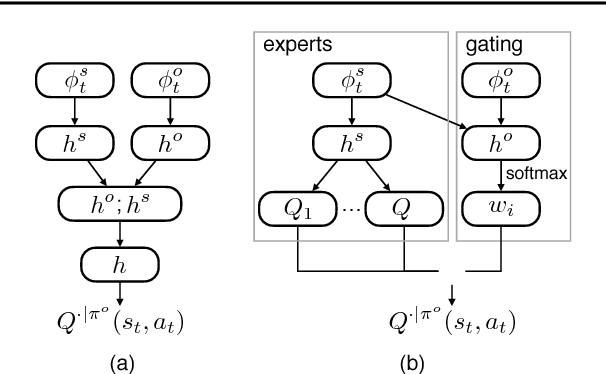
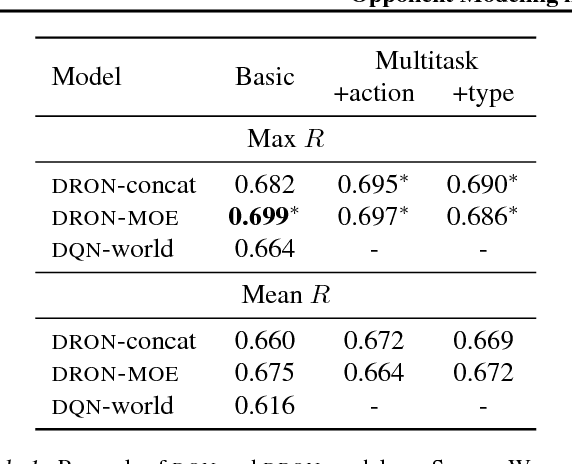
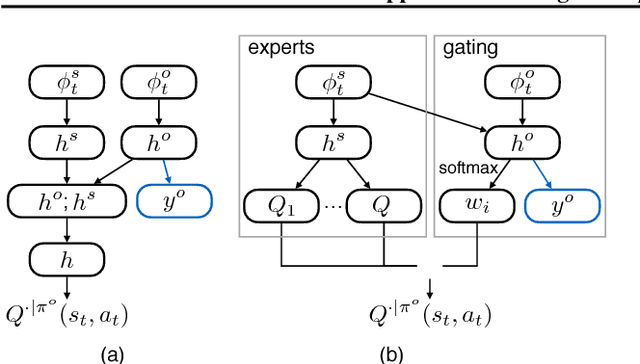
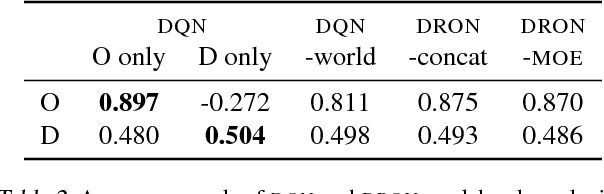
Opponent modeling is necessary in multi-agent settings where secondary agents with competing goals also adapt their strategies, yet it remains challenging because strategies interact with each other and change. Most previous work focuses on developing probabilistic models or parameterized strategies for specific applications. Inspired by the recent success of deep reinforcement learning, we present neural-based models that jointly learn a policy and the behavior of opponents. Instead of explicitly predicting the opponent's action, we encode observation of the opponents into a deep Q-Network (DQN); however, we retain explicit modeling (if desired) using multitasking. By using a Mixture-of-Experts architecture, our model automatically discovers different strategy patterns of opponents without extra supervision. We evaluate our models on a simulated soccer game and a popular trivia game, showing superior performance over DQN and its variants.