 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentral Yup'ik and Machine Translation of Low-Resource Polysynthetic Languages
Sep 09, 2020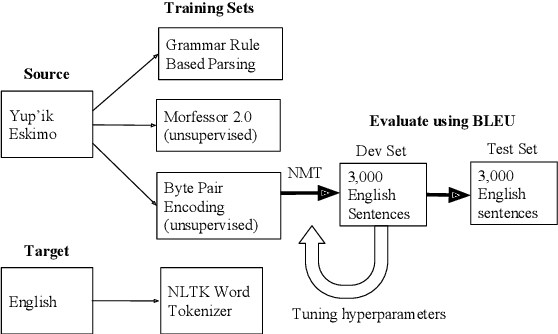
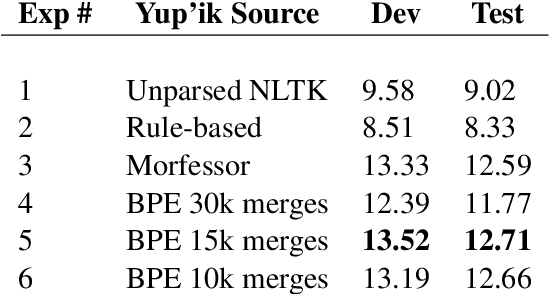
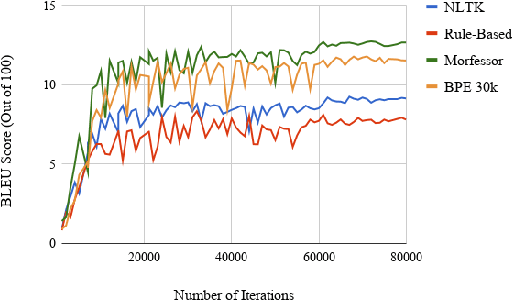
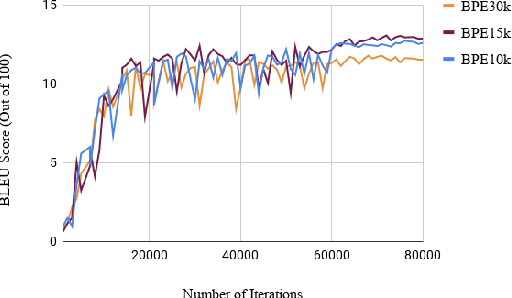
Machine translation tools do not yet exist for the Yup'ik language, a polysynthetic language spoken by around 8,000 people who live primarily in Southwest Alaska. We compiled a parallel text corpus for Yup'ik and English and developed a morphological parser for Yup'ik based on grammar rules. We trained a seq2seq neural machine translation model with attention to translate Yup'ik input into English. We then compared the influence of different tokenization methods, namely rule-based, unsupervised (byte pair encoding), and unsupervised morphological (Morfessor) parsing, on BLEU score accuracy for Yup'ik to English translation. We find that using tokenized input increases the translation accuracy compared to that of unparsed input. Although overall Morfessor did best with a vocabulary size of 30k, our first experiments show that BPE performed best with a reduced vocabulary size.
Distributed Deep Q-Learning
Oct 15, 2015



We propose a distributed deep learning model to successfully learn control policies directly from high-dimensional sensory input using reinforcement learning. The model is based on the deep Q-network, a convolutional neural network trained with a variant of Q-learning. Its input is raw pixels and its output is a value function estimating future rewards from taking an action given a system state. To distribute the deep Q-network training, we adapt the DistBelief software framework to the context of efficiently training reinforcement learning agents. As a result, the method is completely asynchronous and scales well with the number of machines. We demonstrate that the deep Q-network agent, receiving only the pixels and the game score as inputs, was able to achieve reasonable success on a simple game with minimal parameter tuning.