 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Lexical Analysis of Dog Vocalizations via Online Videos
Sep 21, 2023



Deciphering the semantics of animal language has been a grand challenge. This study presents a data-driven investigation into the semantics of dog vocalizations via correlating different sound types with consistent semantics. We first present a new dataset of Shiba Inu sounds, along with contextual information such as location and activity, collected from YouTube with a well-constructed pipeline. The framework is also applicable to other animal species. Based on the analysis of conditioned probability between dog vocalizations and corresponding location and activity, we discover supporting evidence for previous heuristic research on the semantic meaning of various dog sounds. For instance, growls can signify interactions. Furthermore, our study yields new insights that existing word types can be subdivided into finer-grained subtypes and minimal semantic unit for Shiba Inu is word-related. For example, whimper can be subdivided into two types, attention-seeking and discomfort.
Does My Dog ''Speak'' Like Me? The Acoustic Correlation between Pet Dogs and Their Human Owners
Sep 21, 2023



How hosts language influence their pets' vocalization is an interesting yet underexplored problem. This paper presents a preliminary investigation into the possible correlation between domestic dog vocal expressions and their human host's language environment. We first present a new dataset of Shiba Inu dog vocals from YouTube, which provides 7500 clean sound clips, including their contextual information of these vocals and their owner's speech clips with a carefully-designed data processing pipeline. The contextual information includes the scene category in which the vocal was recorded, the dog's location and activity. With a classification task and prominent factor analysis, we discover significant acoustic differences in the dog vocals from the two language environments. We further identify some acoustic features from dog vocalizations that are potentially correlated to their host language patterns.
A Multi-task Selected Learning Approach for Solving New Type 3D Bin Packing Problem
Aug 09, 2018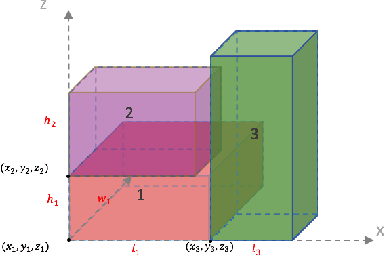
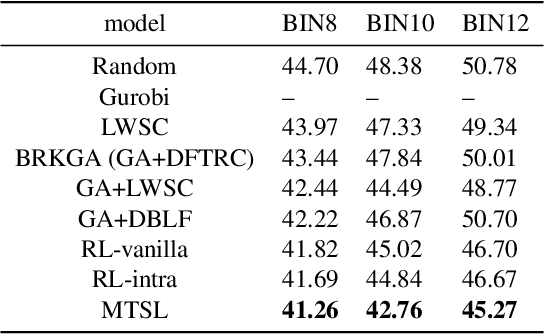
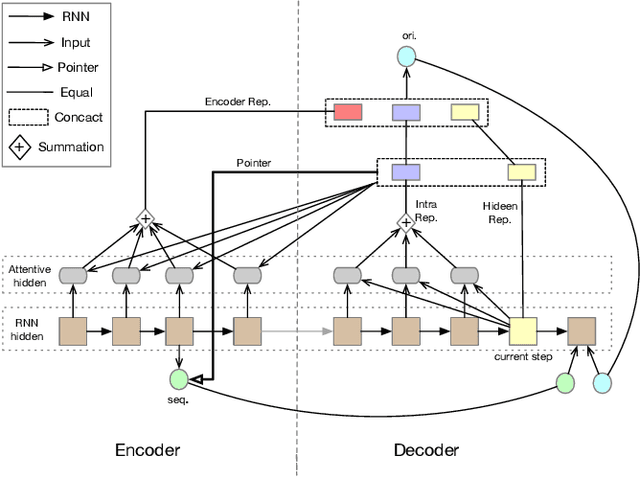
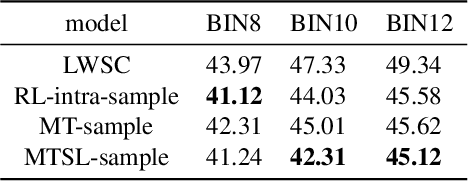
This paper studies a new type of 3D bin packing problem (BPP), in which a number of cuboid-shaped items must be put into a bin one by one orthogonally. The objective is to find a way to place these items that can minimize the surface area of the bin. This problem is based on the fact that there is no fixed-sized bin in many real business scenarios and the cost of a bin is proportional to its surface area. Based on previous research on 3D BPP, the surface area is determined by the sequence, spatial locations and orientations of items. It is a new NP-hard combinatorial optimization problem on unfixed-sized bin packing, for which we propose a multi-task framework based on Selected Learning, generating the sequence and orientations of items packed into the bin simultaneously. During training steps, Selected Learning chooses one of loss functions derived from Deep Reinforcement Learning and Supervised Learning corresponding to the training procedure. Numerical results show that the method proposed significantly outperforms Lego baselines by a substantial gain of 7.52%. Moreover, we produce large scale 3D Bin Packing order data set for studying bin packing problems and will release it to the research community.